友思特方案 | 基于三维点云实现PCB装配螺丝视觉检测
三维点云是完成精密化 PCB 检测的最新视觉技术。友思特 Saccde Vision 视觉扫描系统,采用先进的三维成像技术和算法输出直观点云图,进一步确保了PCB生产的可靠性与稳定性能。


超紧凑、性价比高、多场景可用的高深度精度3D相机,具有稳定的工业级质量,适用于各种应用场景
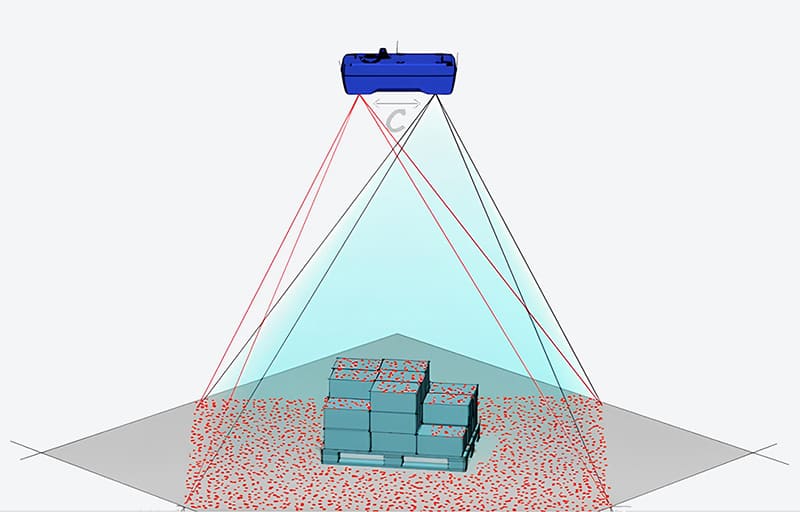
主动激光照明确保在低曝光条件下依然可以捕捉图像,亦可测量快速移动物体,而不会产生动态模糊
超小巧且具有高性价比,为预算有限的项目带来工业级3D技术








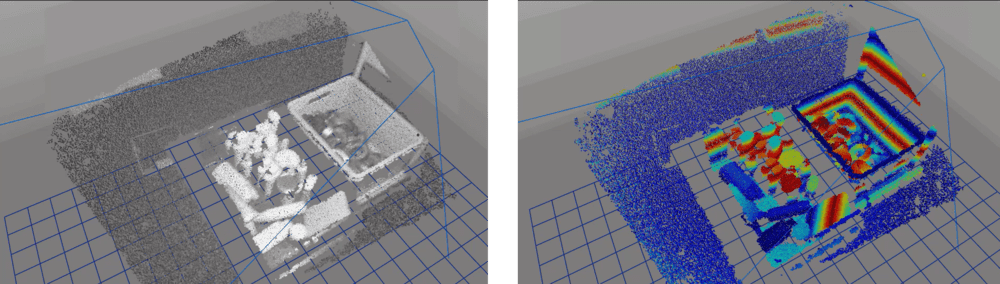
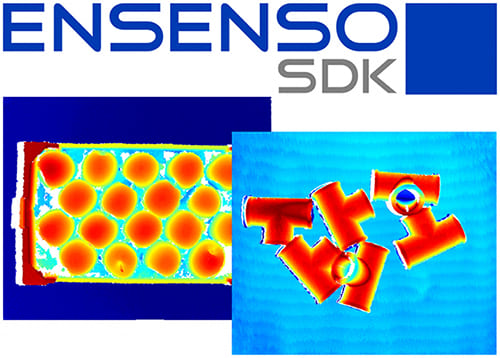
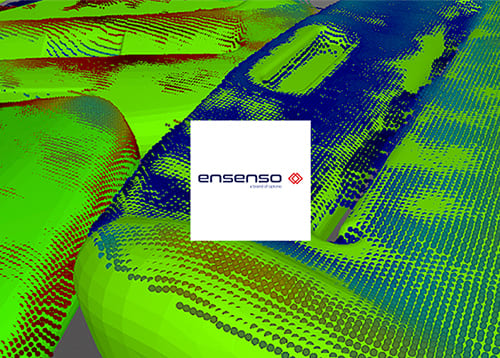
三维点云是完成精密化 PCB 检测的最新视觉技术。友思特 Saccde Vision 视觉扫描系统,采用先进的三维成像技术和算法输出直观点云图,进一步确保了PCB生产的可靠性与稳定性能。

大量的快递运输需求和普遍存在的劳动力短缺问题催生了物流自动化程度的提升。友思特 Ensenso 3D相机为智能机器人卸垛机方案提供精确的图像数据,使800件/小时的物流分拣运力成为现实。

应用于洗衣房的智能机器人填补了自动化在该领域的应用鸿沟。sewts研发的新型智能系统采用友思特合作伙伴IDS提供的Ensenso S10 3D相机以及uEye CP系列相机进行图像处理,该系统的技术现在可用于实现单个生产步骤的自动化,例如给脏污纺织品分类或者给折叠机投料。




精准、坚固、易用
具有紧凑而坚固的3D摄像系统,专门为在恶劣环境条件下使用而设计

配备完全集成RGB传感器
提供多种型号,可选基线长度(S:240 mm,M:455 mm)和焦距

模块化可灵活调整、适应项目需求
镜头外置,可变基线、可调视角、可选镜头,提供160w/500w高分辨率选项
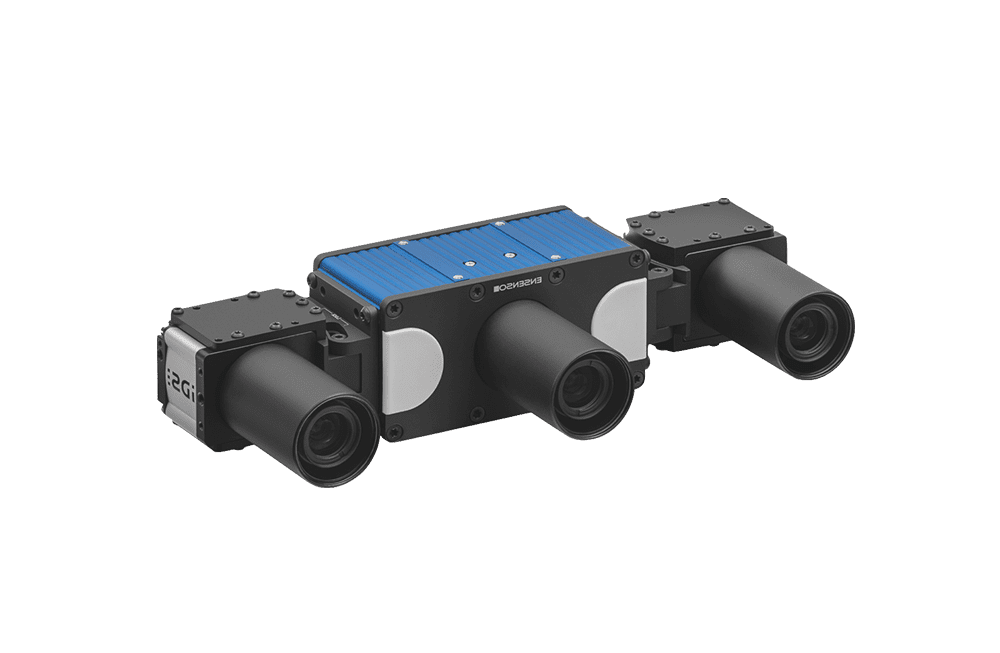
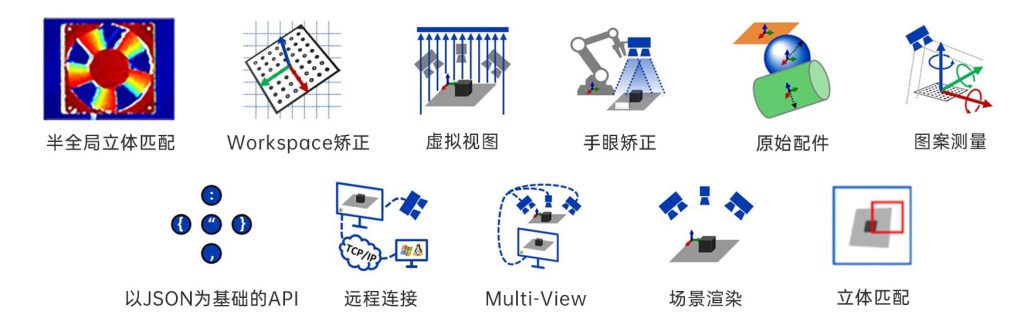
模块化、具备本地数据处理功能
直接在相机端进行2D图像匹配计算、在相机端生成三维点云数据传输到电脑
