合作伙伴
双目散斑3D视觉引导自动化上下料解决方案
高精度3D相机+零代码编写算法模块+智能机械臂,显著提高生产线的效率与智能化程度
在传统的生产制造中,生产线上通常以人工的方式进行物料分拣、上下料等工作流程,然而,这种方式存在着诸多问题,难以适应市场需求的快速变化和个性化定制的要求。
在此背景下,结合双目散斑3D视觉引导机械臂实现自动化上下料成为汽车零部件企业数字化转型的关键技术路径之一。
某大型汽车零部件厂考虑在现有的生产线上使用3D视觉相机自动化上下料应用装配,提高生产效率,减少人工错误,提高零部件生产质量和市场竞争力,项目需求如下:
有多种不同型号部件需要检测
部件为金属工件有部分反光
工作距离要求2m料框尺寸1.2*0.8m
深度方向定位精度要求1mm内
节拍4s内完成单个工件抓取
该企业和友思特达成深度合作,采用友思特的自动化上下料软硬件解决方案,根据其需求,友思特定制了一站式的解决方案套装:
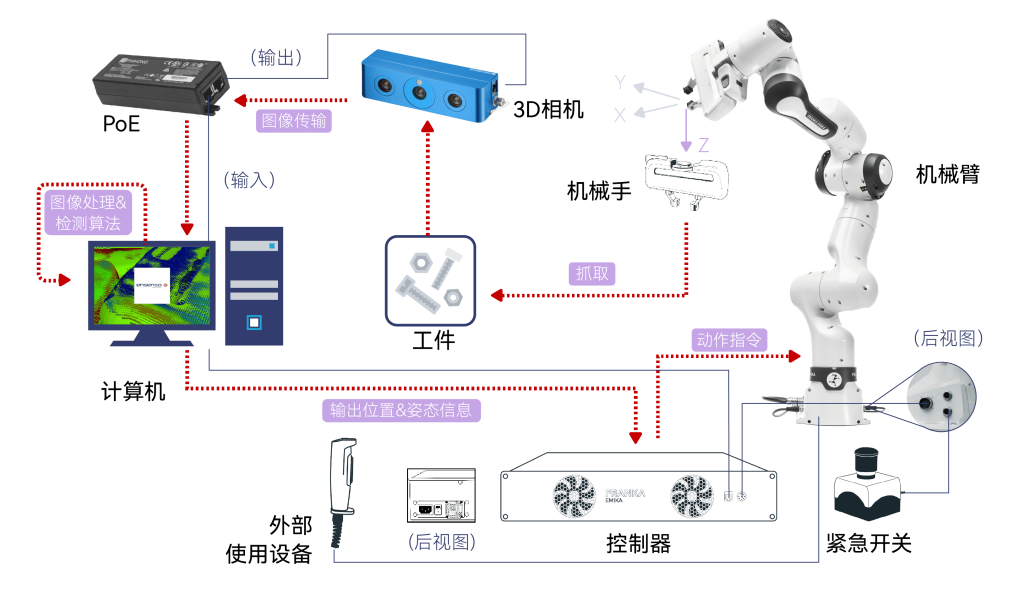
实时成像——高精度双目散斑3D相机:在2m工作距离下,该相机检测的视野范围可达1390*927mm,z轴方向上的精度为0.35mm定位——PartFinder零代码编写算法模块:导入工件的3D模型,经过软件上的简单参数配置,即可完成检测定位,并自动化识别检测工件的中心坐标以及姿态角抓取上下料——FR3机械臂:3D相机通过TCP/IP协议将数据发送至机械臂,控制机械臂到指定位置,抓取目标工件到预设定的装放位置
本方案采用双目散斑大基线3D相机,基线长度455mm,3D相机传感器工作距离远,精度高,视野大。相机本身带有200W大功率投影仪,可以将散斑纹理信息发射在工件表面,增加工件的纹理信息,获取工件表面完整的点云轮廓信息数据;
本方案使用现成的PartFinder软件模块,与相机兼容运行,提供调用SDK例程,用户无需耗费很长时间进行程序软件上的开发。当产线上会有多种零件生产需求时,可以快速响应,生成对应的检测模型,不需要做大量的图像采集以及标注、训练操作;
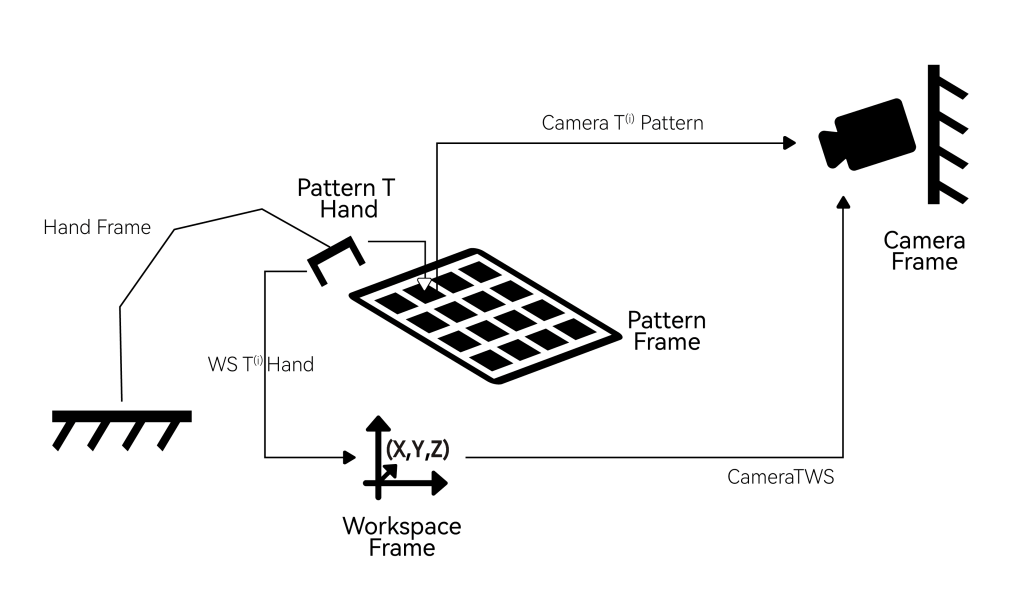
关于3D相机与机械臂的手眼标定工作,提供手眼标定的SDK以及方法介绍,用户不需要再进行手眼标定算法方面研究,将SDK运行通过多次调节机械臂夹持标定板在相机下的姿态,采集完多张图像即可计算得到机械臂与相机之间的坐标关系。
如果您对自动化上下料方案方面有需求欢迎咨询我们