合作伙伴
基于PartFinder模块算法实现工件点云检测定位应用 解决方案
零代码编写,便捷分割和识别工件位置方向
随着工业自动化与视觉技术的不断发展,企业纷纷开始采用3D视觉引导汽车部件自动化上下料操作。
友思特推出的工件点云检测定位应用解决方案,基于Part Finder模块与Ensenso3D相机设备,能够实现部件识别与分割,并配合控制机器臂和其他设备动作,显著提升自动化上下料、分拣等系统的效率和准确性。
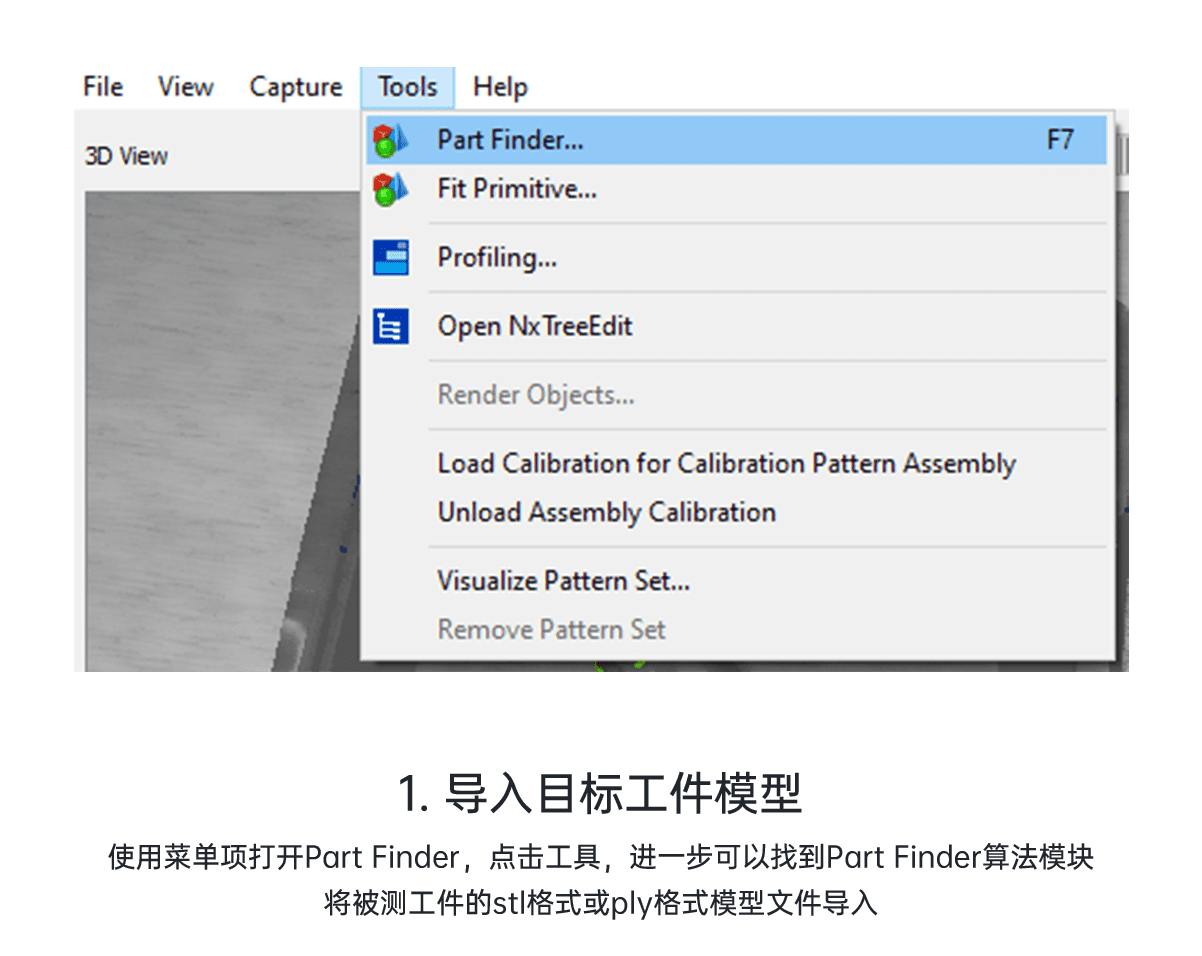
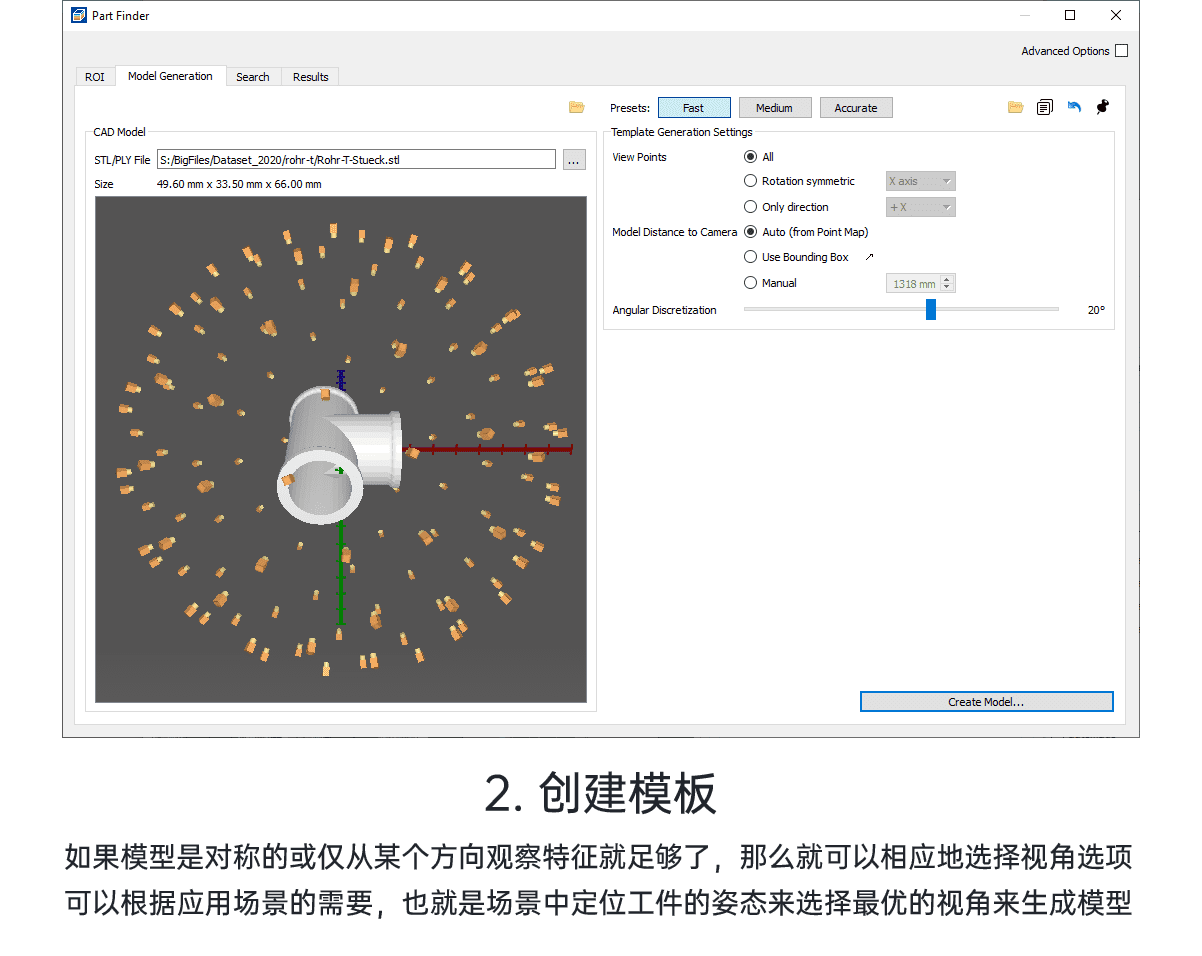
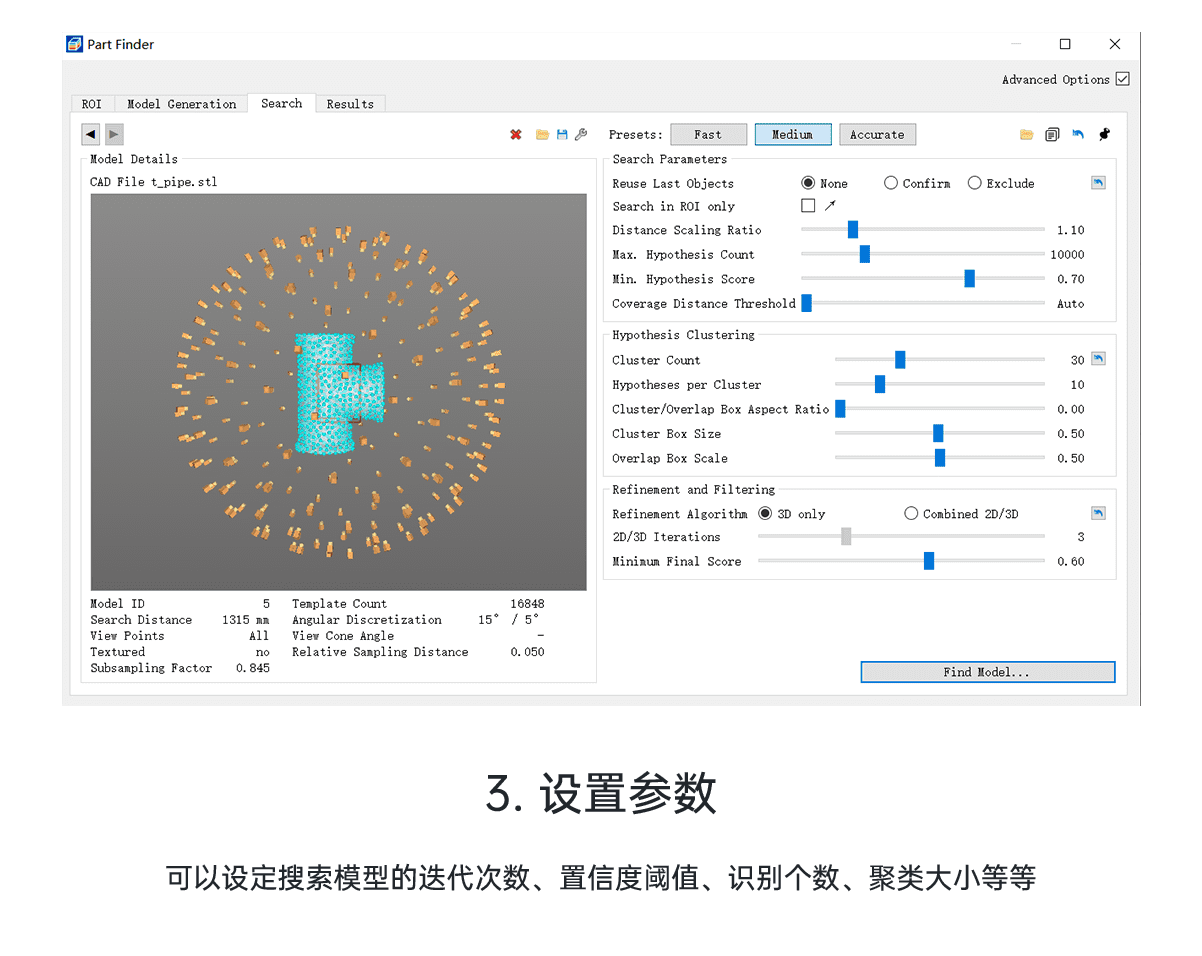
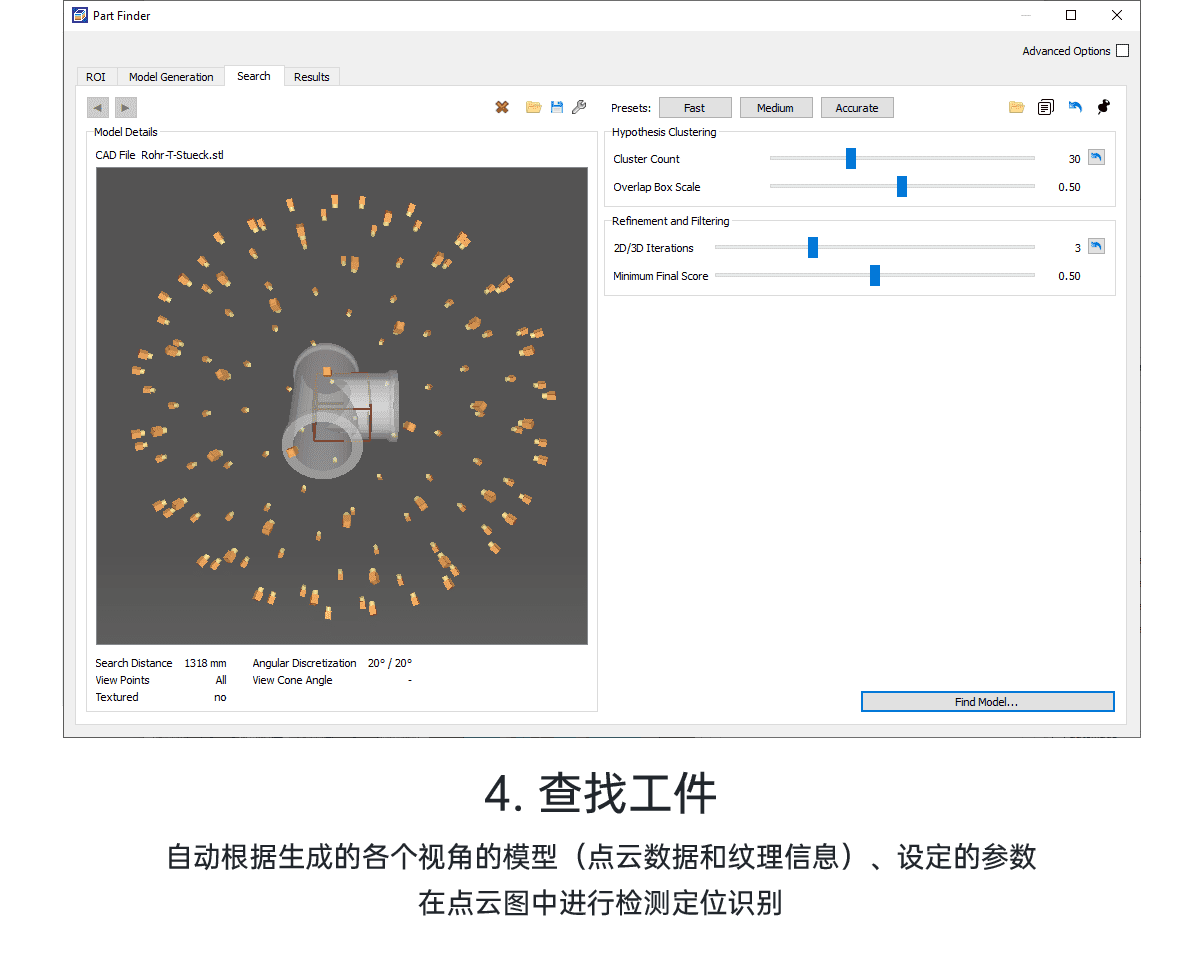
此算法模块的应用方便快捷,零代码编写,只需在软件UI界面进行 “导入目标工件模型” —— “创建模板” —— “设置参数” —— “查找工件” 4个步骤的操作即可准确识别、分割、计算工件位置方向。
在软件UI界面进行“导入目标工件模型”——“创建模板”——“设置参数”——“查找工件”四个步骤,就可以在一堆工件的场景下将每个工件分割出来,并且能够准确计算工件的中心坐标位置以及姿态方向。
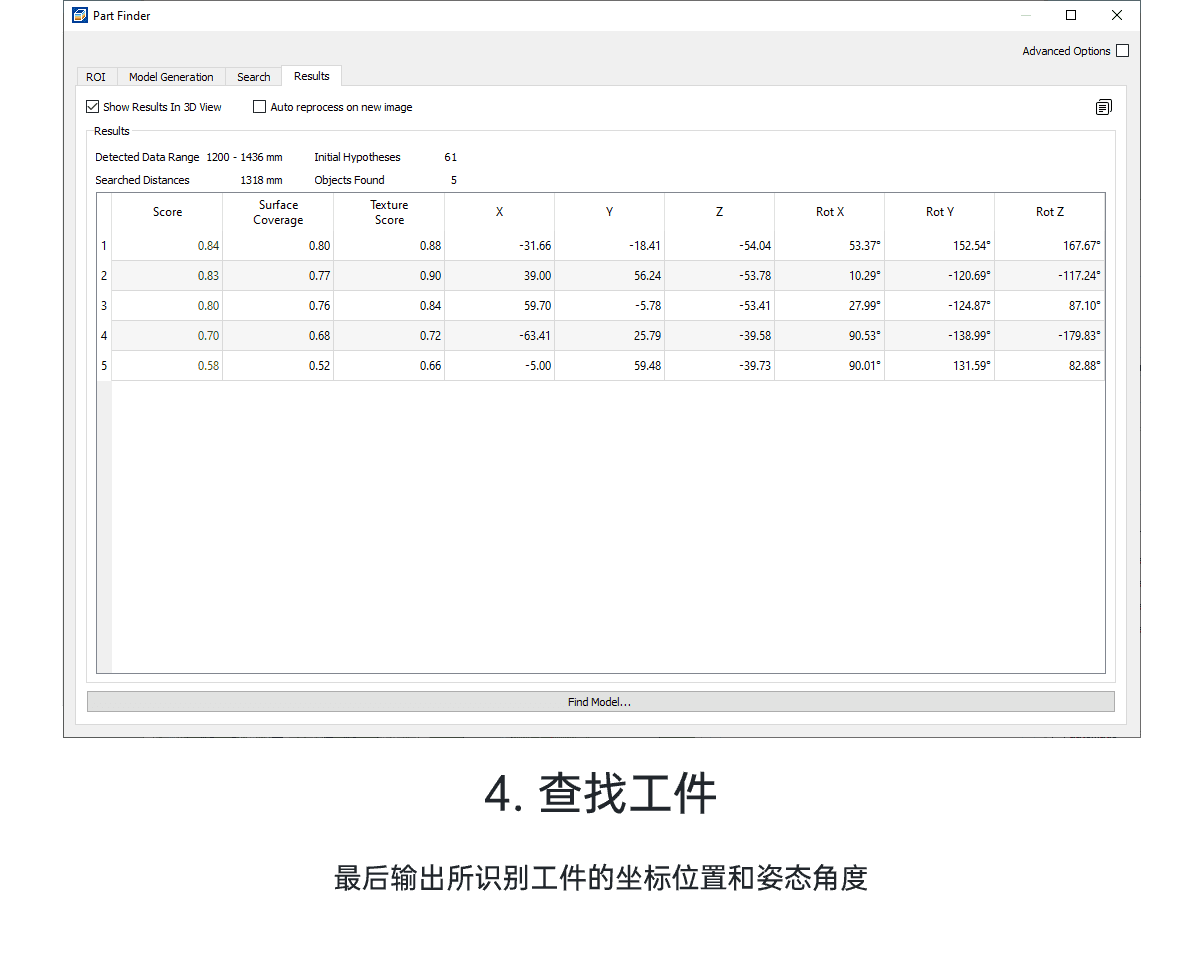
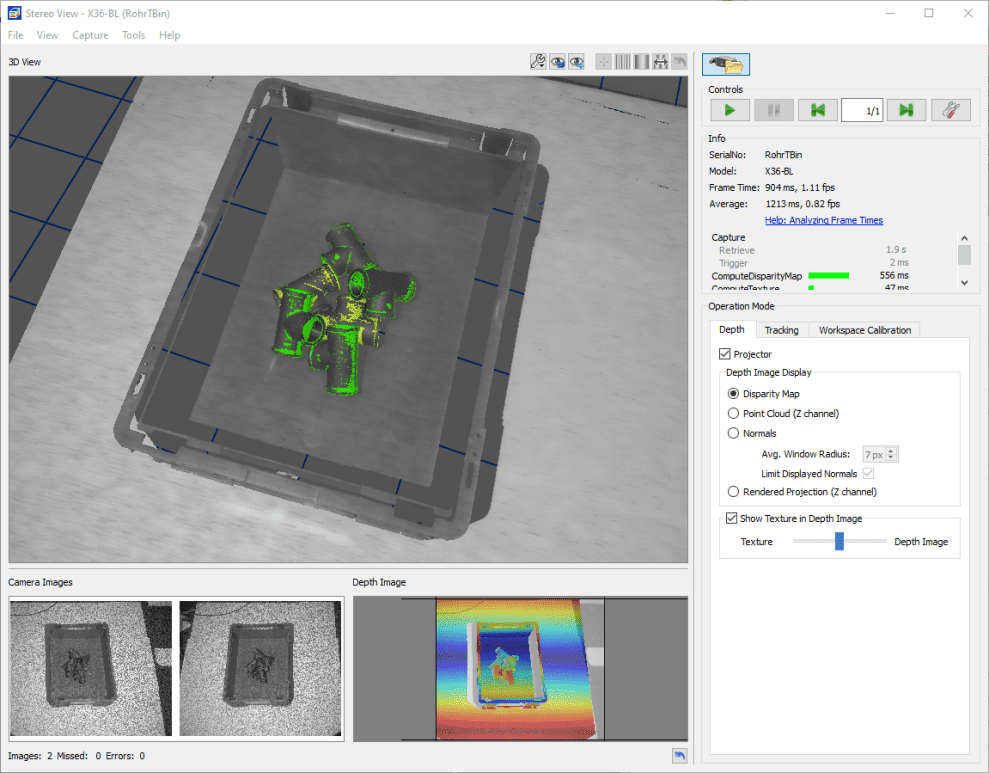
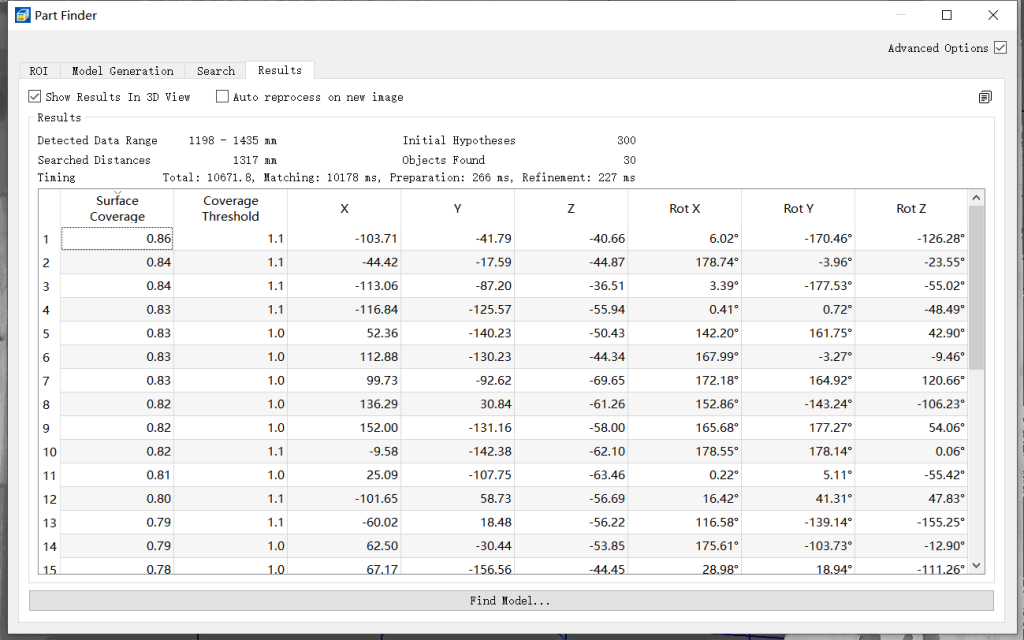
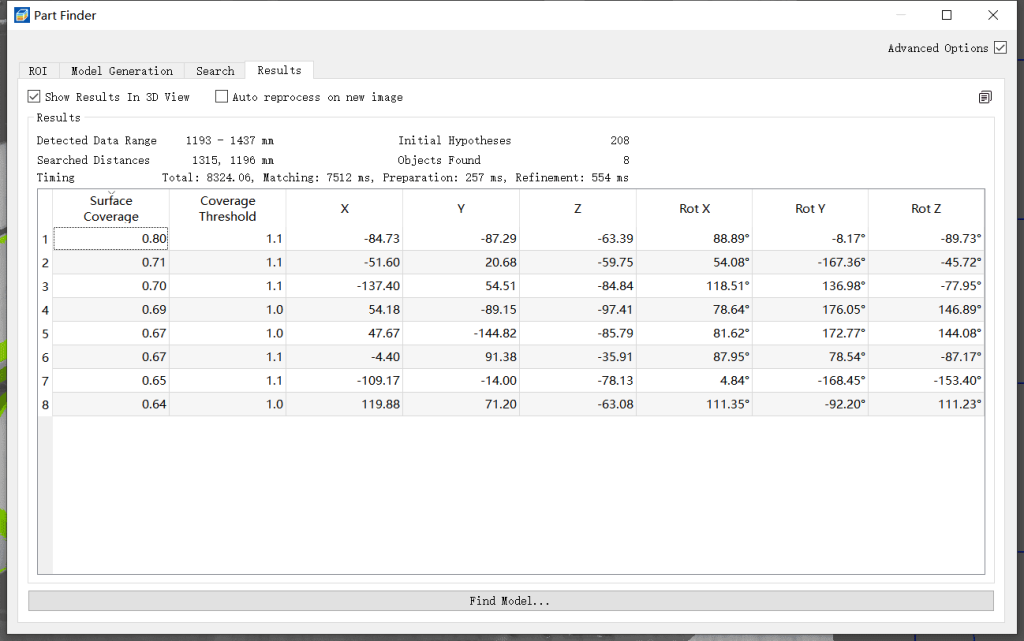
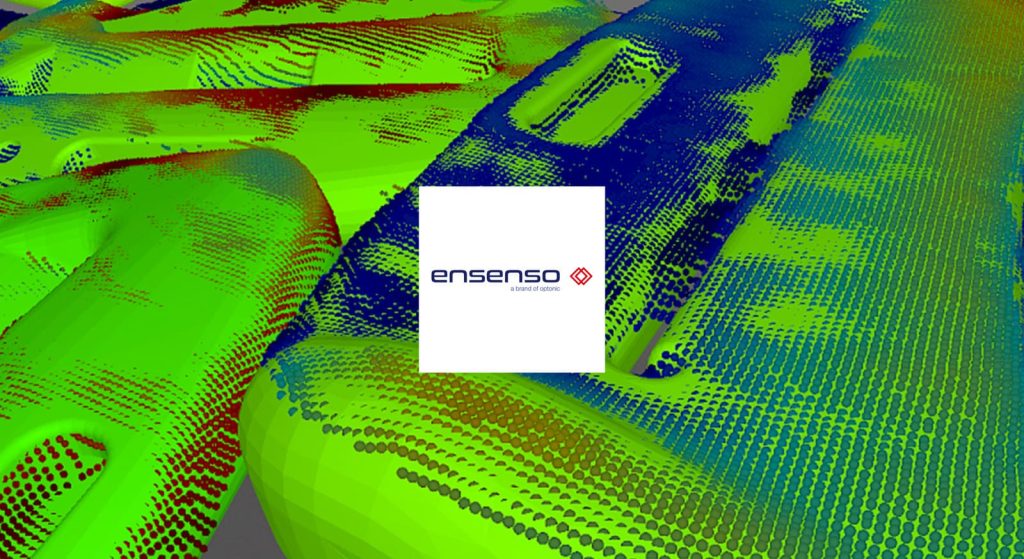
可视化效果的颜色表示匹配的覆盖范围。好的匹配将是绿色的,较差的匹配(例如某些部分被遮挡)将是橙色的。并且会生成总报表,将视野范围内所识别定位的所有工件列出来,包含识别分数、XYZ坐标姿态等信息。
至此,透过我们的Part Finder算法功能模块,便可以找到3D相机视野下的每一个单独的目标物。除此之外,为了让您能够将我们的点云实例分割部署到自己的应用中,我们会提供C++例程,您可以调用我们的SDK,快速便捷地实现网络模型生成和搜索目标物两个操作。
齿轮盖点云图及点云定位检测结果图对比
齿轮盖检测结果数据表
齿轮工件点云图及点云定位检测结果图对比
齿轮工件检测结果数据表
产品盒子点云图及点云定位检测结果图对比
产品盒子检测结果数据表
如果您对该方案有需求欢迎联系我们定制