
友思特应用 | 基于高精度双目散斑 3D 相机的放射治疗视觉定位应用
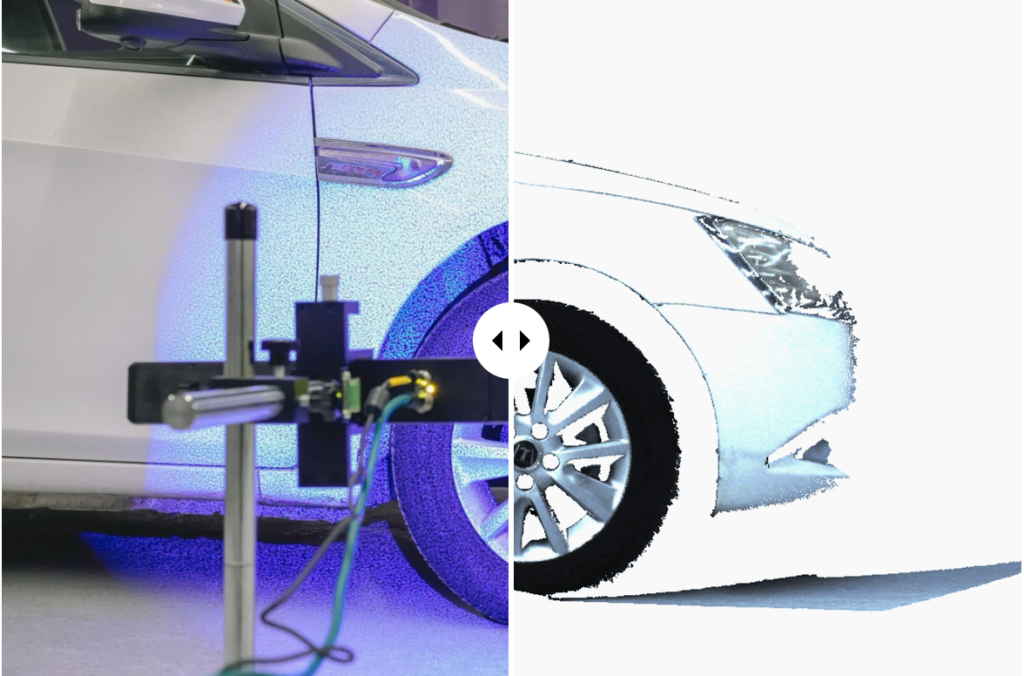
在放射治疗领域,毫米级的误差可能意味着健康组织受损或肿瘤漏照。随着放疗技术日益精进,对患者体位验证与实时监控的需求也达到了前所未有的高度。传统的光学表面成像系统在精度、抗干扰性及复杂曲面适应性方面面临挑战。本文将深入探讨基于高精度双目散斑3D相机的视觉定位系统如何革新放疗定位流程,提升治疗的安全性与有效性。














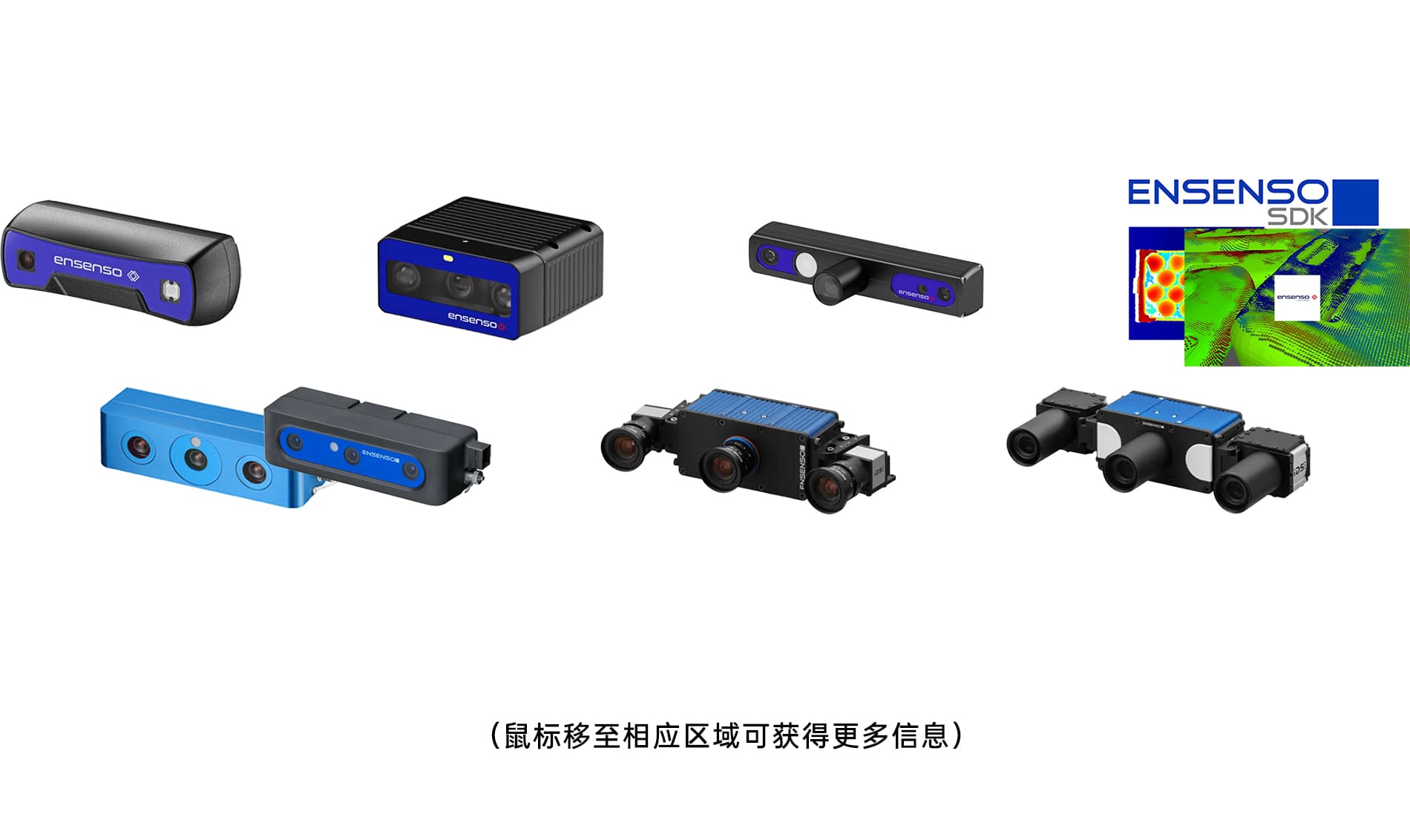
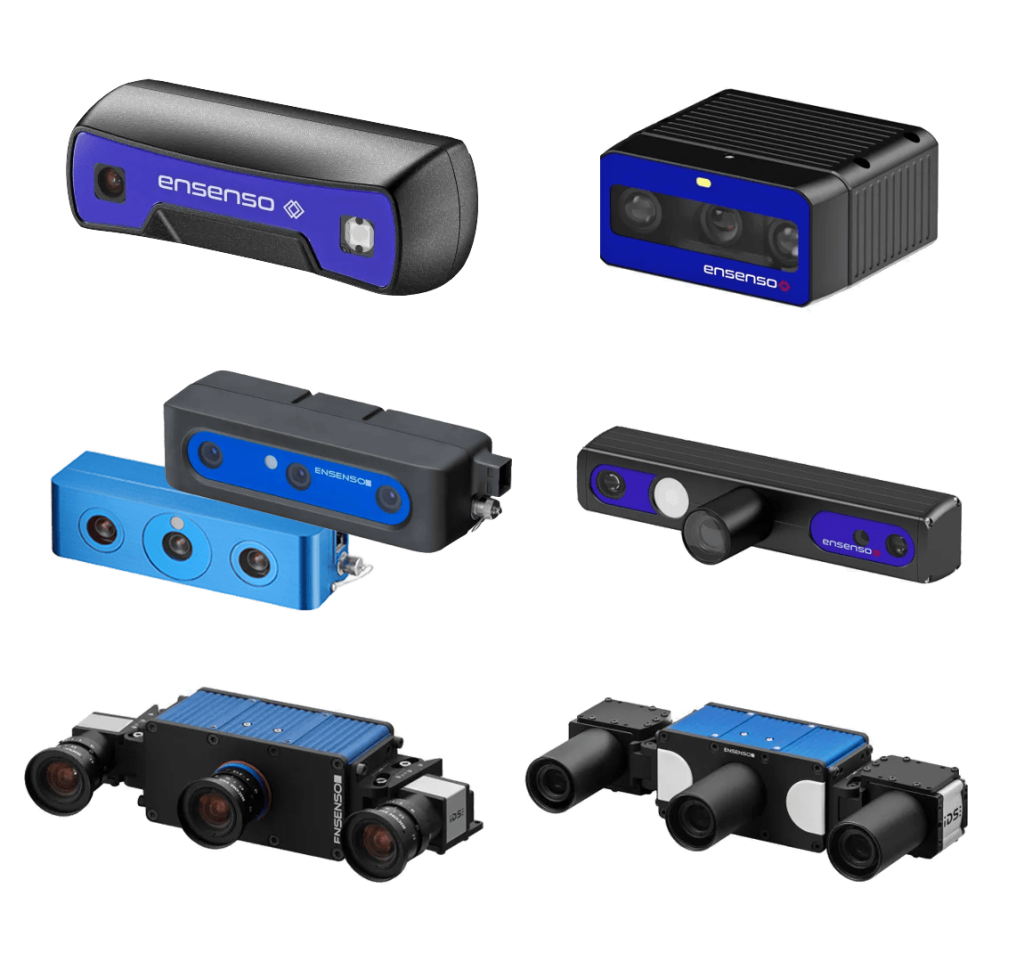
GigE (PoE),IP65/67,普遍适用在人工智能激光点三角测量
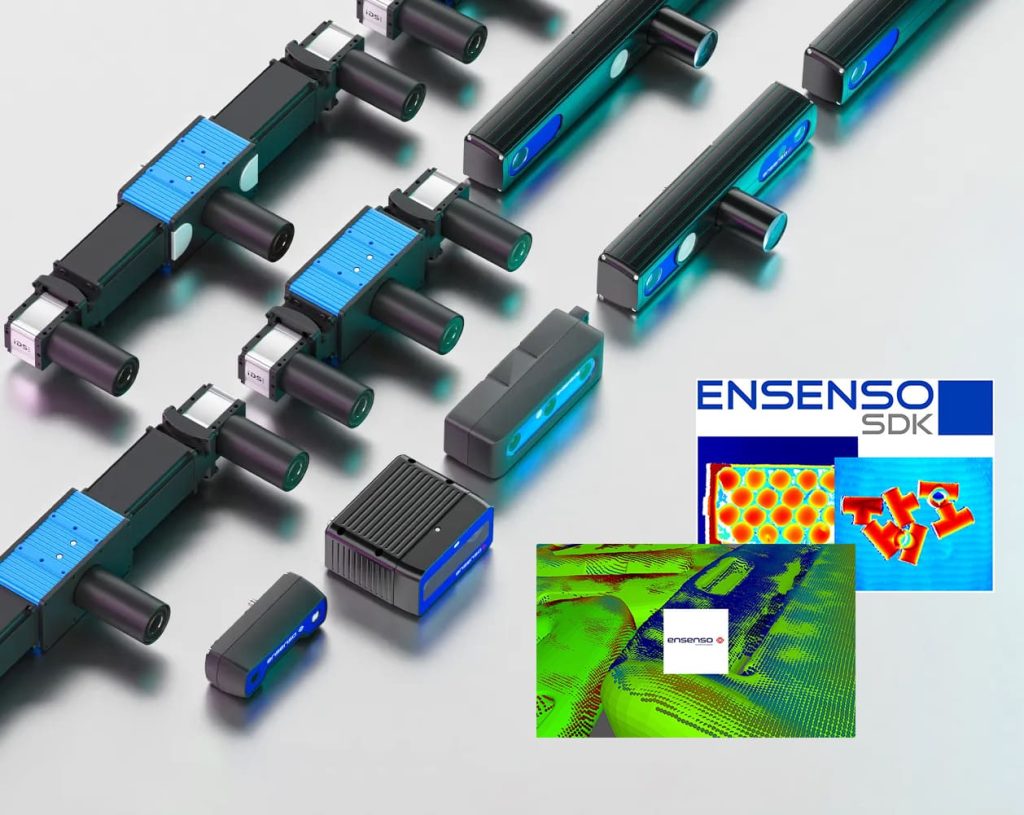
两个 500 万像素 传感器,非常紧凑的 75 毫米立体基线,铝质外壳,GigE,IP65/67,用于移动和静止物体,FlexView。彩色版使用了两个 RGB 传感器和绿色 LED 投影灯
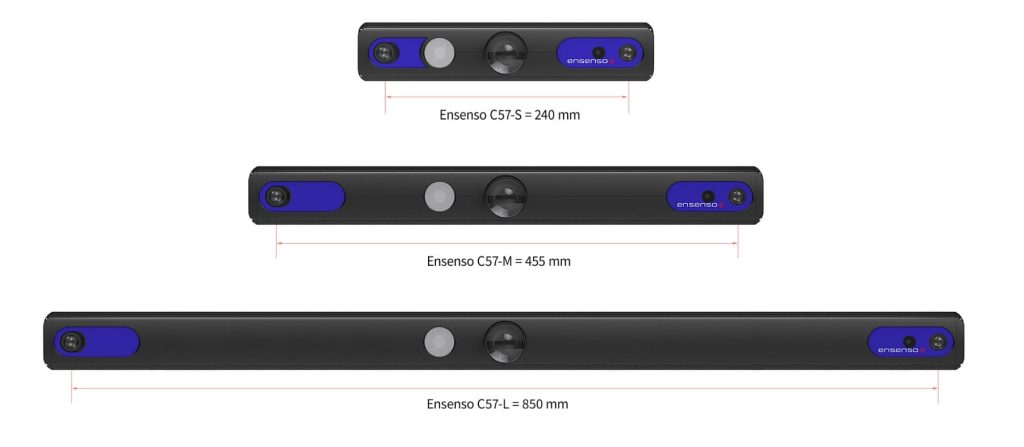
5 MP立体和2 MP RGB传感器,240或455毫米立体基线,铝制外壳,GigE,IP65/67,工作距离可长达5米,适用于移动或静止物体(带 FlexView)
Ensenso SDK提供易于设置的向导和相机校准支持、基于GPU的图像处理
主动立体视觉,2.3 MP传感器,GigE,PoE,IP65/67,适用于移动(N31/N41)或静止物体(带FlexView的N36/N46)
主动立体视觉,1.6或5 MP传感器,弹性系统,GigE,IP30或IP65/67,适用于移动(X30)或静止物体(带FlexView2的X36)
主动立体视觉,1.6或5 MP传感器,弹性系统,GigE,IP65/67,整合数据处理,适用于移动(XR30)或静止物体(带FlexView2的XR36)


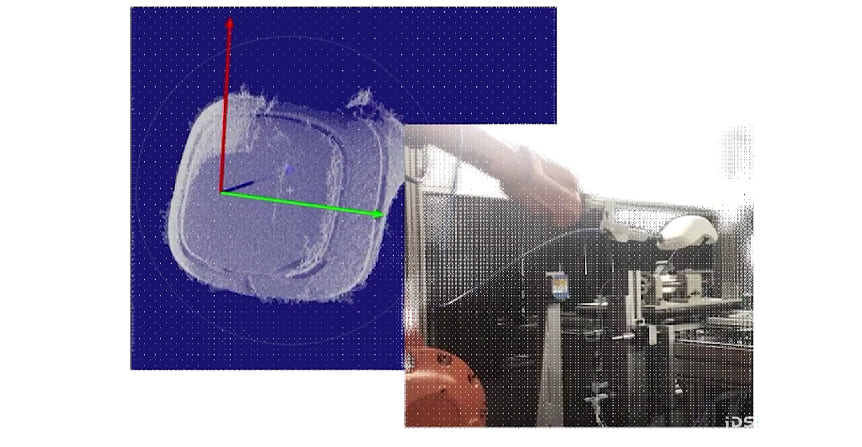


















在放射治疗领域,毫米级的误差可能意味着健康组织受损或肿瘤漏照。随着放疗技术日益精进,对患者体位验证与实时监控的需求也达到了前所未有的高度。传统的光学表面成像系统在精度、抗干扰性及复杂曲面适应性方面面临挑战。本文将深入探讨基于高精度双目散斑3D相机的视觉定位系统如何革新放疗定位流程,提升治疗的安全性与有效性。

传统工业3D视觉深陷两难困局:要么高价换取高性能,要么牺牲精度以控制成本。智能iToF技术打破了这一僵局。它通过片上深度处理、全局快门与高频调制等创新,在维持成本优势同时,实现了高分辨率、复杂光照稳定性与动态物体精准捕捉。这不仅填补了市场空白,更以其易用、紧凑和可靠的特性,正崛起为苛刻工业应用中传统3D方案的强劲替代者

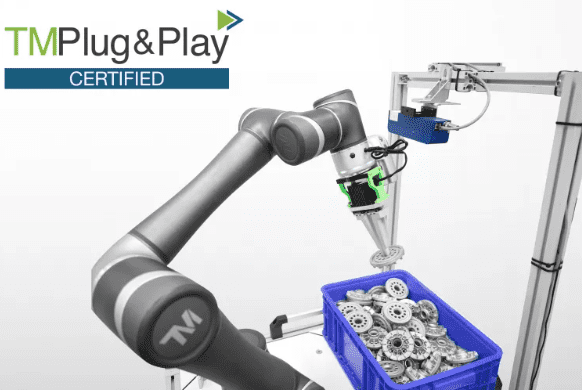
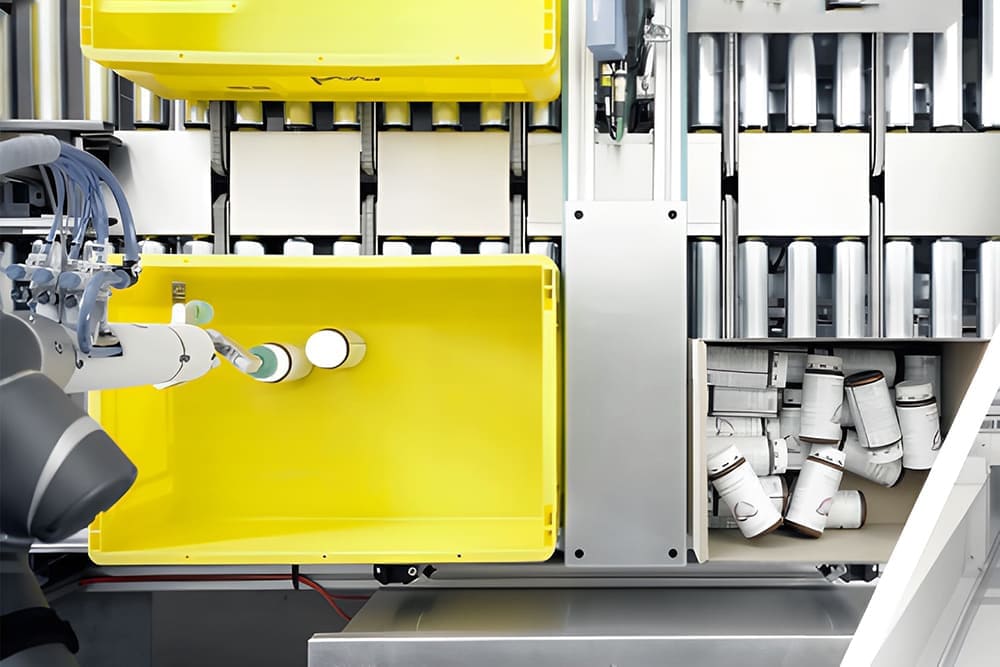
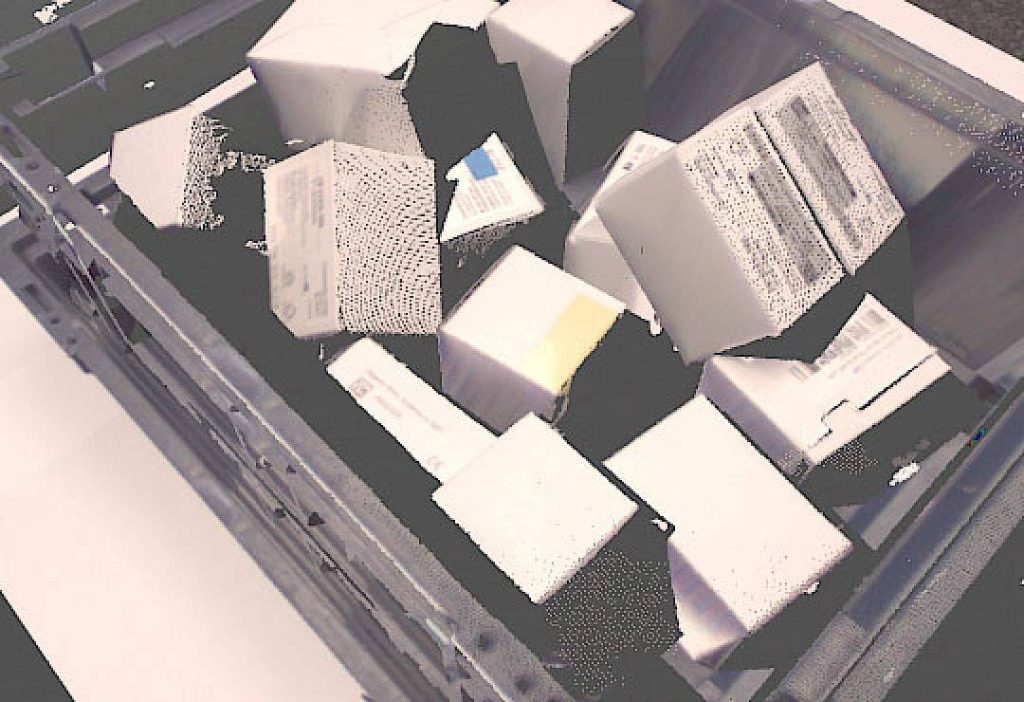
大量的快递运输需求和普遍存在的劳动力短缺问题催生了物流自动化程度的提升。友思特 Ensenso 3D相机为智能机器人卸垛机方案提供精确的图像数据,使800件/小时的物流分拣运力成为现实。

硬件选型:根据应用项目具体需求选定适用的3D相机型号
测试服务支持:按需进行样品测试与效果评估验证
系统集成与方案设计:根据您的需求制定完整集成解决方案
软硬件培训:全方位覆盖硬件产品使用的各环节,帮助您迅速掌握软硬件使用技巧


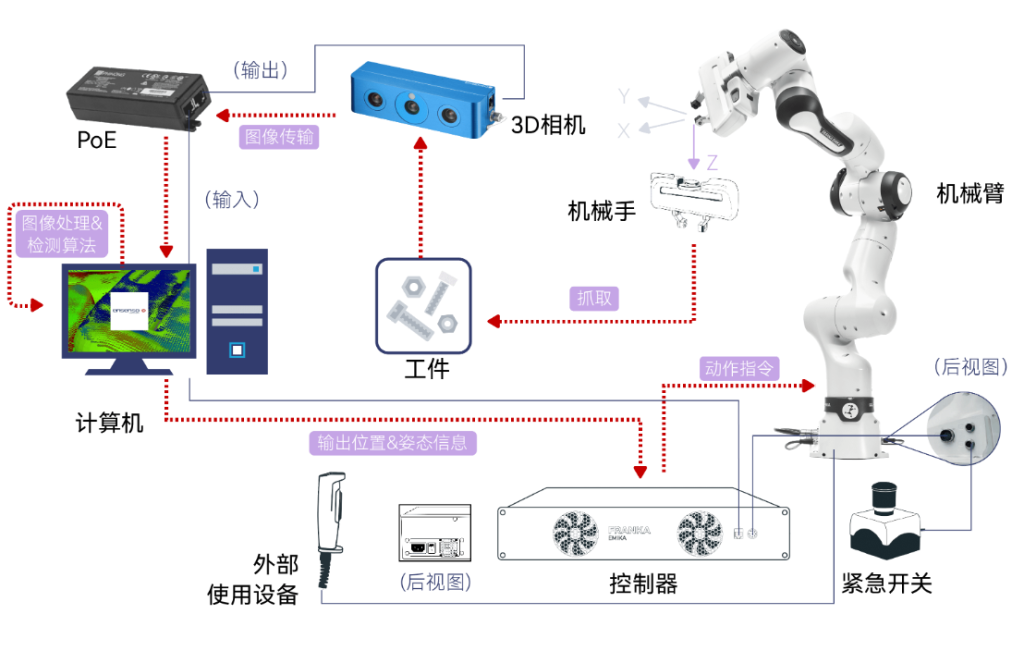
数据流实时监控可视化工业流程
即插即用,无需编程,无需额外 PC,搭载 Ambarella 先进 SoC 技术

应用可能性几乎不受任何限制
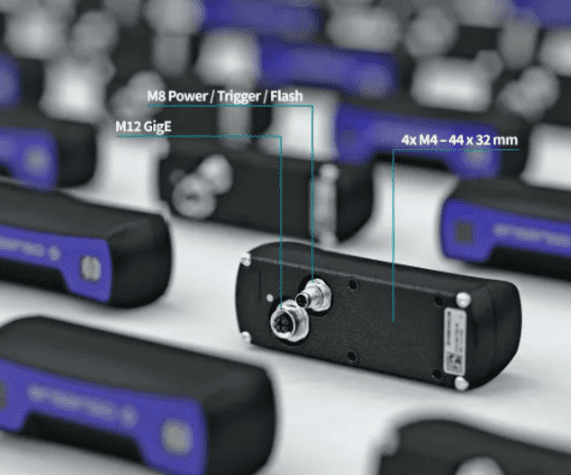
根据各种应用需求提供不同感光芯片尺寸、帧率、分辨率、接口的相机
数据更少,速度更快,精度更高
不再捕获静态和不相关背景,数据量比基于帧的图像传感器少 10 到1000 倍

基于人工智能独立执行机器视觉任务
快速、经济且无需提前进行知识储备,提供对象分类、对象检测等功能
