
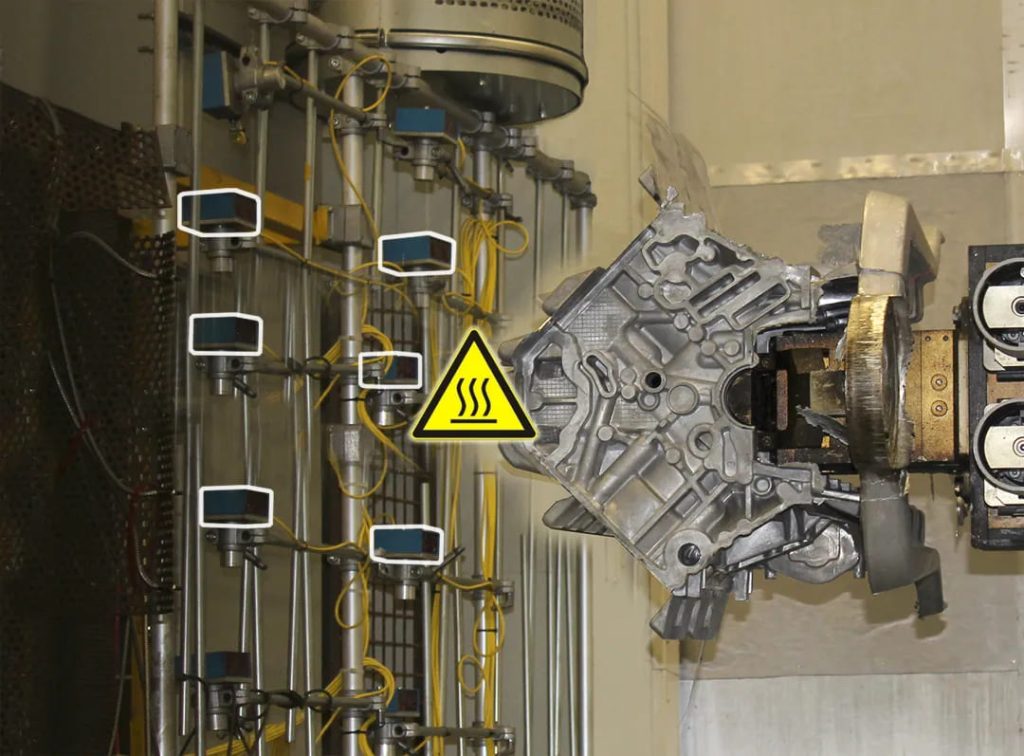
汽车行业压铸零部件自动化视觉检测系统

友思特 方案产品套装介绍

Ensenso N系列相机
● 带GigE接口——功能丰富,灵活性高
● 小巧坚固的铝制外壳
● IP65/67
● 全局快门式CMOS传感器和图案投影仪,可选蓝色或红外LED
● 最大帧率(3D):10(2x像素融合:30)和64个视差等级
● 最大帧率(离线处理):30(2x像素融合:70)和64个视差等级
● 设计工作距离最长3000毫米(N35相机)和可变图像场
● 输出单个3D点云,数据来自多相机模式下使用的所有相机
● 从多个视角实时构造3D点云
● 集成的FlexView技术可提高点云的精度,并且在复杂的表面上也能确保3D数据的稳健性
● 使用“投影纹理立体视觉”技术捕捉无纹理物体表面的图像
● 小巧坚固的铝制外壳
● IP65/67
● 全局快门式CMOS传感器和图案投影仪,可选蓝色或红外LED
● 最大帧率(3D):10(2x像素融合:30)和64个视差等级
● 最大帧率(离线处理):30(2x像素融合:70)和64个视差等级
● 设计工作距离最长3000毫米(N35相机)和可变图像场
● 输出单个3D点云,数据来自多相机模式下使用的所有相机
● 从多个视角实时构造3D点云
● 集成的FlexView技术可提高点云的精度,并且在复杂的表面上也能确保3D数据的稳健性
● 使用“投影纹理立体视觉”技术捕捉无纹理物体表面的图像