Skip to content
首页
产品中心
机器视觉
光电检测
车载视觉
工业相机
CMOS工业相机 uEye+
3D立体相机 Ensenso
iTOF 3D相机 uEye Nion
New!
事件相机 Event-based
Hot!
AI 相机 NXT
工业监控摄像机 uEye live
高带宽相机
图像采集
PCIE 图像采集卡
相机模拟器/仿真卡
高性能FPGA模块
嵌入式边缘计算机
图像处理与采集软件
外置式图像采集卡
嵌入式视频接口
红外系列
OCT成像系统
Hot!
OCT成像应用与测试案例
New!
高光谱相机
红外相机
显微/天文相机
太赫兹
光学仪器与元件
波长选择器/单色仪
光谱传感器芯片/光谱仪
反射物镜
模块化图像采集回放系统
proFRAME Serdes视频流采集卡
HOT!
proFRAME基板
相机适配器
配套软件库
配套配件
智能视觉处理单元
SXVPU 智能可扩展视觉处理单元
实时ISP处理软件
SXIVE 快速成像原型设计系统
激光雷达
车载激光雷达 OPSENS系列
工业激光雷达 ALTOS系列
MEMS混合固态激光雷达 CUBE 1
数字化3D显微系统
sinaSCOPE Model & Pro
NEW!
视觉软件平台
AI自动深度学习平台
eBUS Player
eBUS SDK
eBUS Edge
eBUS Receive
半导体光源
白光/多通道光源
紫外曝光/固化光源
液体光导
光纤耦合光源
刑侦光源
激光器及配件
纳秒/亚纳秒激光器
高速扫频源
激光器配件
ZED系列立体感知系统
ZED GMSL/USB立体感知相机
Hot!
GMSL单目相机 ZED X One
GMSL双目相机 ZED X系列
USB双目相机 ZED 2系列
立体感知边缘计算机 ZED Box
应用方案:机械臂、人型机器人、叉车、AMR、拖拉机
应用方案:包裹计数、体积尺寸测量、托盘占用监测
应用方案:具身智能、物流自动化、越野自主驾驶、数字孪生
门控视觉相机系统
门控视觉相机系统VISDOM
合作伙伴及客户
解决方案
通用视觉检测方案
双目散斑3D视觉引导自动化上下料解决方案
工件3D尺寸测量&点云处理方案
工件点云检测定位解决方案
检尺智能识别系统
汽车工业
锂电新能源
软包电池极耳胶&薄膜OCT检测解决方案
半导体制造
半导体光刻光源解决方案
光谱测试
全自动可调谐光源解决方案
显微成像解决方案
行业应用
锂电新能源行业应用
锂电新能源行业
电池贴胶与薄膜封装穿透检测
电池多类型缺陷AI视觉检测
电池模组与相关半导体器件3D精密检测
产线高带宽视觉图像采集与边缘计算
汽车行业
车载视频采集与回放系统
车载全天候视觉与测绘系统
汽车零部件产线视觉检测
车身质量与轮毂装配检测
半导体行业
晶圆制造生产与加工
晶圆和电路芯片检测与检查
合作伙伴
技术服务支持
测试服务
硬件培训服务
软件培训服务
资源中心
项目应用
常见问题
产品目录
技术科普
机器视觉与成像应用云课堂
机器视觉
光电检测
车载视觉
机器视觉产品技术资源中心
产品目录下载
技术文章
演示视频
光学检测产品技术资源中心
产品目录下载
技术文章
演示视频
车载视觉产品技术资源中心
产品目录下载
技术文章
演示视频
资源下载 / 测试图例
产品目录及介绍文档下载
OCT成像系统应用与测试案例
技术云课堂
OCT技术全解析技术课程
事件相机技术解读课程
紫外光源技术与应用解析课程
智驾视频传输技术课程
高速图像采集与传输技术课程
线上研讨会 / 直播
2026 具身智能专题:深度感知技术助力机器人解构真实世界
2025 年度新型成像技术介绍与应用解读
2024 光学检测与光学器件测试的前沿应用
2024 为新能源电池行业聚能的视觉与光电方案
2023 机器视觉与成像应用解决方案
2022 光电技术直播月
合作伙伴
在线店铺
淘宝店铺 – 机器视觉产品
淘宝店铺 – 光电检测产品
京东店铺 – 机器视觉产品
京东店铺 – 光电检测产品
新闻中心
联系我们
关于友思特&虹科
联系我们
友思特合作伙伴
加入我们
X
【虹科】固态激光雷达扫描模式:呈眼形且可配置
虹科激光雷达点云为什么呈眼形?如何配置?这些配置针对不同应用的优势是什么?
虹科固态激光雷达点云具有与众不同的特征,其中最引人注目的是它的呈人眼形状,这与传感器的设计以及开发所谓的“扫描式激光雷达”有关。为了理解为什么虹科激光雷达的点云是椭圆形的,我们需要看看传感器内部以及其扫描模式。
通过计算飞行时间探测距离
虹科固态激光雷达采用基于
飞行时间原理
的技术:发射激光脉冲,并根据其被物体反射回来并被传感器再次检测到所需的时间,可以精确地确定物体的距离。每秒重复这个过程数百万次,就可以生成周围环境的详细图像。
虹科固态激光雷达通过一个单一的激光源发射激光脉冲。如果传感器仅由该激光源和探测器组成,但没有光束偏转单元,则只能在一个方向上进行测量。因此,为了获得环境的整体图像,传感器设计还包括一个光束偏转单元,也称为
扫描仪
。由于这些组件的存在,这个激光雷达也被称为:扫描式激光雷达。扫描仪的任务是将光束偏转到环境中,以便将其捕获一个整体,而不是捕获一个点。
两面反射镜形成视场
虹科固态激光雷达的光束偏转单元由两个MEMS反射镜组成。这两个反射镜可以自由摆动。一面反射镜水平移动,另一面反射镜垂直移动。水平反射镜以连续且几乎谐波的曲线振荡。最大光圈角限制了水平视野,但它始终可以聚焦。
另一方面,垂直反射镜的振幅是可变的,可以连续变化。两个反射镜的振动共同构成了扫描环境的视场。一旦启动,反射镜便以“本征频率”振荡。反射镜越大,本征频率通常越低,因为反射镜的重量随尺寸的增加而增加。
反射镜相互移动,形成椭圆扫描模式
但是为什么要有一个高本征频率呢?因为它决定捕获所有“扫描线”所需的时间。一条扫描线是水平镜摆动运动的一半——即激光束由右至左或从左至右扫描一次。两个反射镜的本征频率相互调谐并进行相位偏移,从而以椭圆扫描模式扫描周围的环境。
此模式是这样产生的:水平镜从左向右移动,而垂直镜开始以小幅度振荡。因此,第一条扫描线几乎是一条水平线。对于第二条扫描线,水平反射镜现在从右向左摆动,而垂直反射镜从上到下移动。因此,第二扫描线位于第一扫描线的下方。第三条线从左到右一直延伸到第一条线的下方,直到达到最大垂直视场。一旦场景被完全捕获,所谓的一帧就完成了。
扫描模式的配置
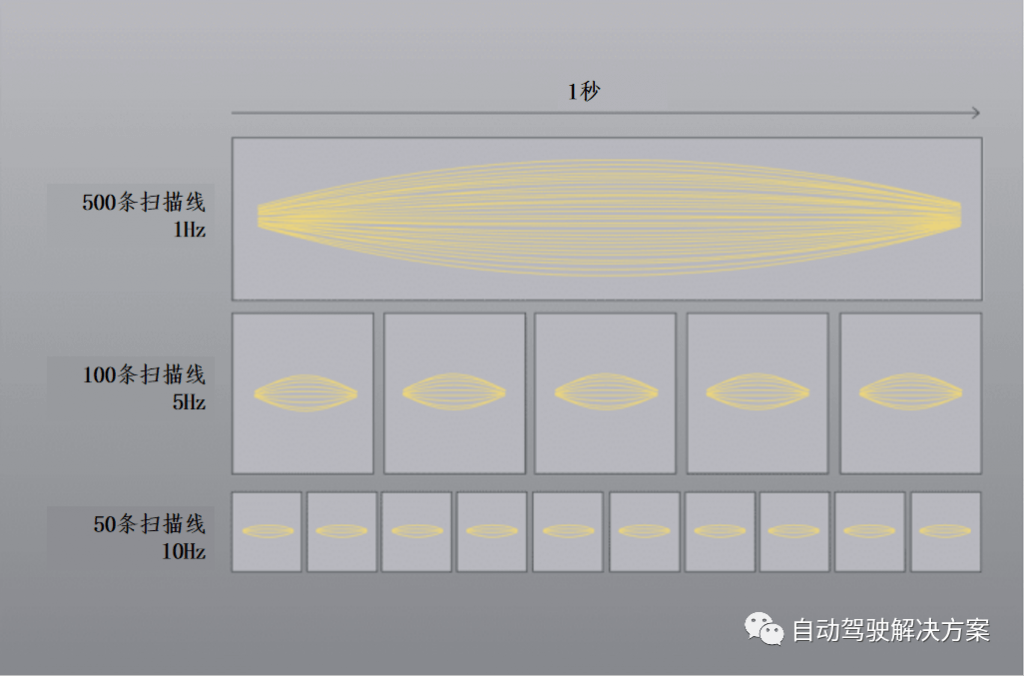
虹科固态激光雷达最多可以产生大约每秒500条扫描线,由于这是一个可设置变量,因此可以应用在不同的条件下。例如,如果每帧需要大量的垂直扫描线,则可以在垂直视场小的情况下设定小的扫描线间距,或者当扫描线之间的距离较大时设置较大的垂直视场来实现。
但是,每帧创建的扫描线越多,扫描整个场景所需的时间就越长。每秒扫描一次视野,最多约500条扫描线。即每个像素测量一次。但是,在一秒钟内传感器的视场会发生很多变化,因此,提高帧速率对于很多应用而言是有意义的。即每秒更频繁地扫描整个视野。要做到这一点,必须减少每帧扫描线的数量,同时也会降低分辨率。
水平分辨率也可以更改。虹科固态激光雷达通过发射激光脉冲工作。这意味着,不是连续光束,而是以特定间隔发射短激光脉冲。在点云中创建特征数据“点”。如果要提高水平分辨率,则必须缩短激光脉冲发射之间的持续时间,从而增加“脉冲频率”。激光二极管不能过热,因为过热会限制脉冲频率,并且还必须符合的人眼安全标准。由于扫描线在边缘处会聚,从而变得过于强烈,通常情况下扫描图像的边缘会被“切断”,在水平光圈角的最外边缘不会发射任何脉冲以保护人眼,而虹科固态激光雷达仅允许用户进行符合人眼安全的扫描设置。
配置灵活,应用广泛
虹科固态激光雷达的特点是所有的这些设置(包括扫描线数量设置,可自定义的视野和可调节的水平分辨率)都可以在用户界面中进行实时调整,当然,也可以通过API进行调整。相关的参数都可以根据当前应用和相应的要求进行调整,也可以在运行期间进行更改。
虹科固态激光雷达可以为每个应用进行单独配置。例如,如果要捕获较大的区域或者需要更高的分辨率来检测小物体,我们则可以上述的方式轻松对传感器进行相应设置。此外,传感器不必仅针对某一应用进行配置,然后专门用于该应用。 由于虹科固态激光雷达十分灵活,因此如果需要的话,可以对其进行重新配置以应用到其他场景。
点击了解更多激光雷达信息
友思特案例 | 锂电行业视觉检测案例集锦(一)
2026年1月8日
友思特新闻 | 友思特与Atik Cameras正式建立合作伙伴关系!
2025年3月25日
友思特应用 | 基于高精度双目散斑 3D 相机的放射治疗视觉定位应用
2026年1月4日
友思特方案 | 搭建红外桥梁:嵌入式视觉接口助力红外热像仪传输
2024年9月13日
友思特案例 | 医疗设备行业视觉检测案例集锦(二)
2025年12月31日