
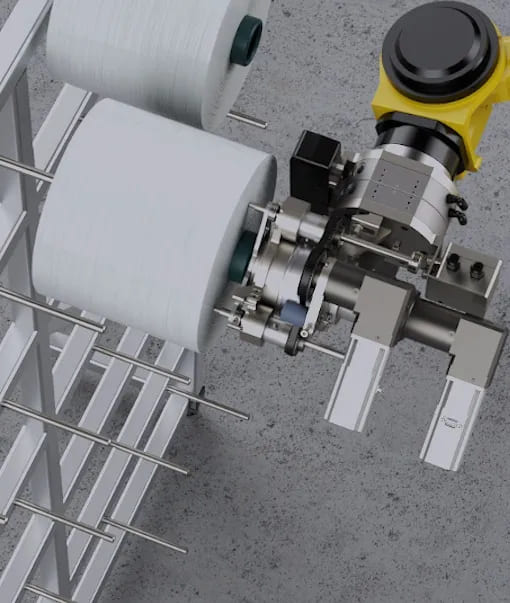
用于自动放置筒子架的自动驾驶机器人辅助系统

友思特 应用方案
友思特 方案软件

友思特 方案应用前景
友思特 方案产品套装介绍

Ensenso C相机
● 满分辨率下30帧/秒的实时3D数据
● 通过集成的图案投影仪轻松捕捉无纹理表面的物体
● 多相机镜头操作,可从不同侧面侦测物体
● 工作距离可达3000mm,具体取决于相机型号
● 集成的FlexView技术可提高点云的精度,并且在复杂的表面上也能确保3D数据的稳健性
● 使用“投影纹理立体视觉”技术捕捉无纹理物体表面的图像
● 便携应用场合或协作机器人的理想之选
● 通过集成的图案投影仪轻松捕捉无纹理表面的物体
● 多相机镜头操作,可从不同侧面侦测物体
● 工作距离可达3000mm,具体取决于相机型号
● 集成的FlexView技术可提高点云的精度,并且在复杂的表面上也能确保3D数据的稳健性
● 使用“投影纹理立体视觉”技术捕捉无纹理物体表面的图像
● 便携应用场合或协作机器人的理想之选