
友思特案例 | ZED X 助力 InDro Robotics 革新自主导航技术
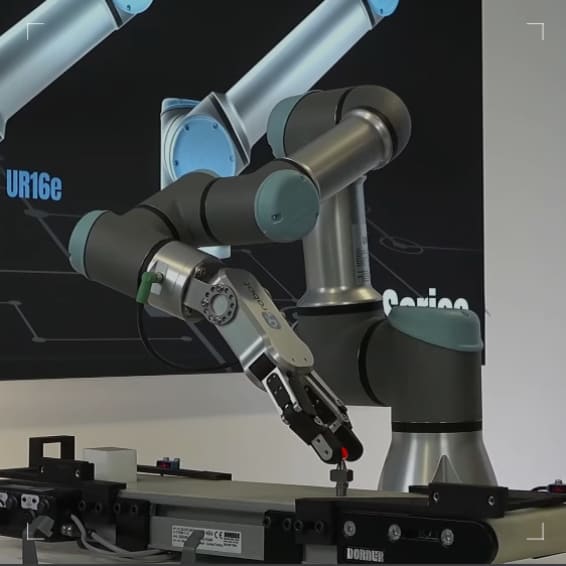
InDro Robotics是加拿大无人机、地面及海洋机器人研发企业,专注于复杂作业、数据采集与监控等领域的自主机器人解决方案,旗舰产品「哨兵巡检机器人」可实现自主导航与基础设施监测。四年来,其全系列平台采用友思特合作伙伴Stereolabs视觉相机技术,通过部署ZED X系统,在性能、成本效益与作业能力上实现显著提升。



















.jpg)
.jpg)




InDro Robotics是加拿大无人机、地面及海洋机器人研发企业,专注于复杂作业、数据采集与监控等领域的自主机器人解决方案,旗舰产品「哨兵巡检机器人」可实现自主导航与基础设施监测。四年来,其全系列平台采用友思特合作伙伴Stereolabs视觉相机技术,通过部署ZED X系统,在性能、成本效益与作业能力上实现显著提升。
友思特合作伙伴Stereolabs ZED SDK 5.1 突破机器人平台实时多相机感知技术极限,全新重构采集与录制管道,升级增强型位姿追踪功能,新增近距深度感知能力,且官方原生支持 Jetson Thor 平台。本次版本迭代让 ZED 全生态体系,在工业场景中运行更高速、更稳定、更全能。

人形机器人、移动机器人及自主决策系统正从实验室走向工厂、仓库和公共区域。为可靠运行,机器人需具备实时处理多传感器的高性能感知管道。NVIDIA Jetson AGX Thor提供所需边缘计算能力,友思特合作伙伴 Stereolabs 将 ZED 相机 空间感知视觉引入该平台,为现实应用提供完整方案。

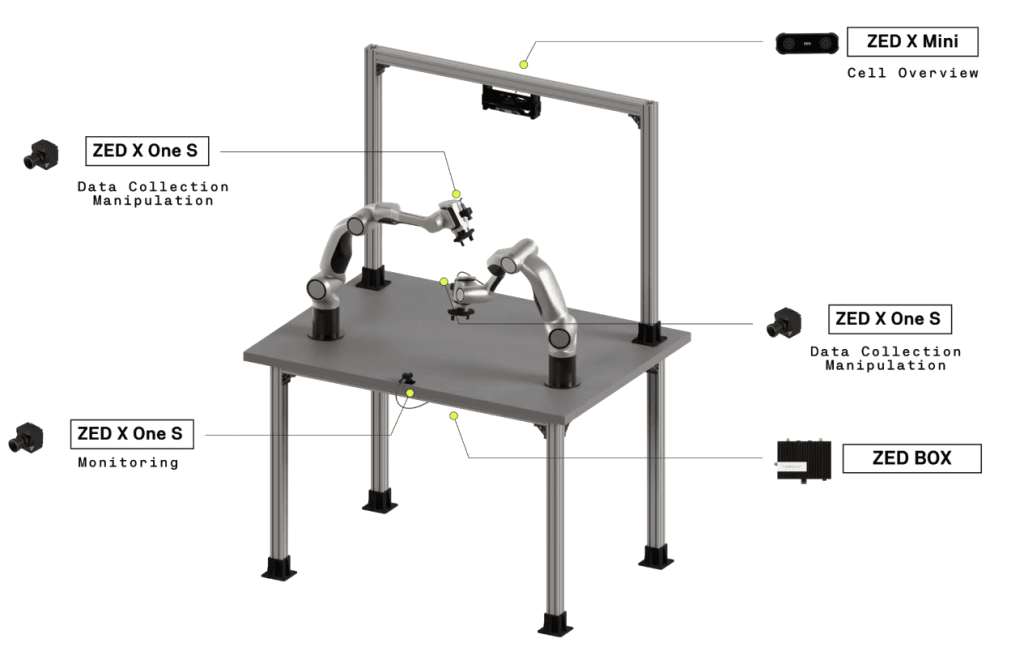
产品选型与硬件适配:
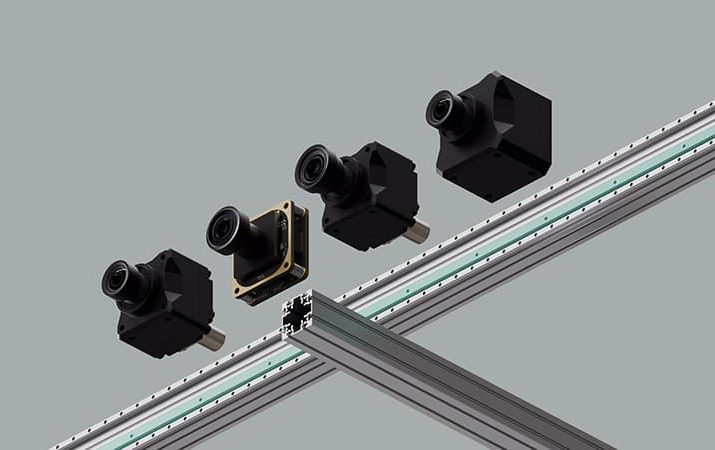
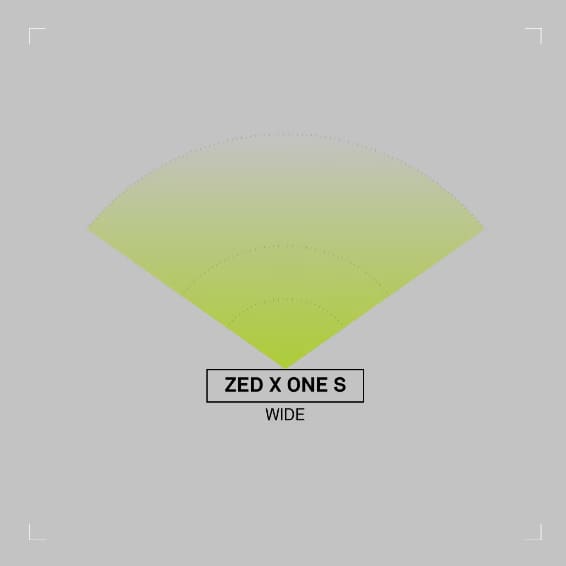
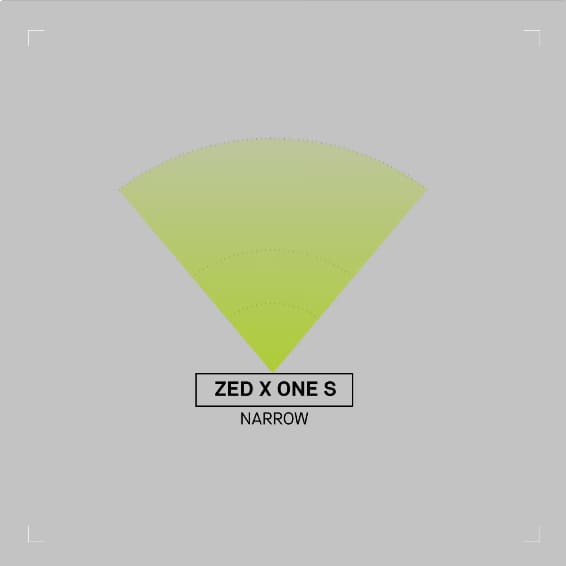
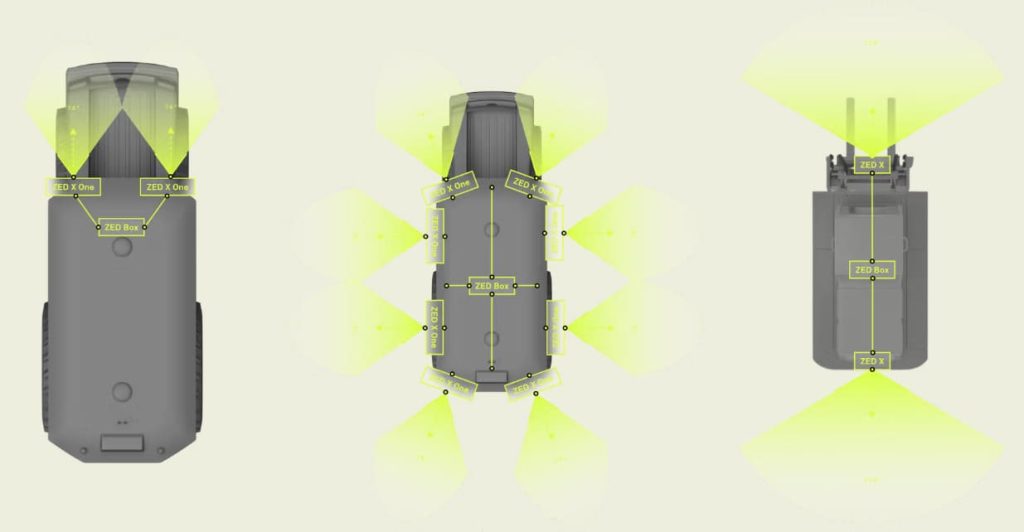
● 传感器选型:ZED 2i/ZED X全系列选型,覆盖室内外、远近程复杂工况
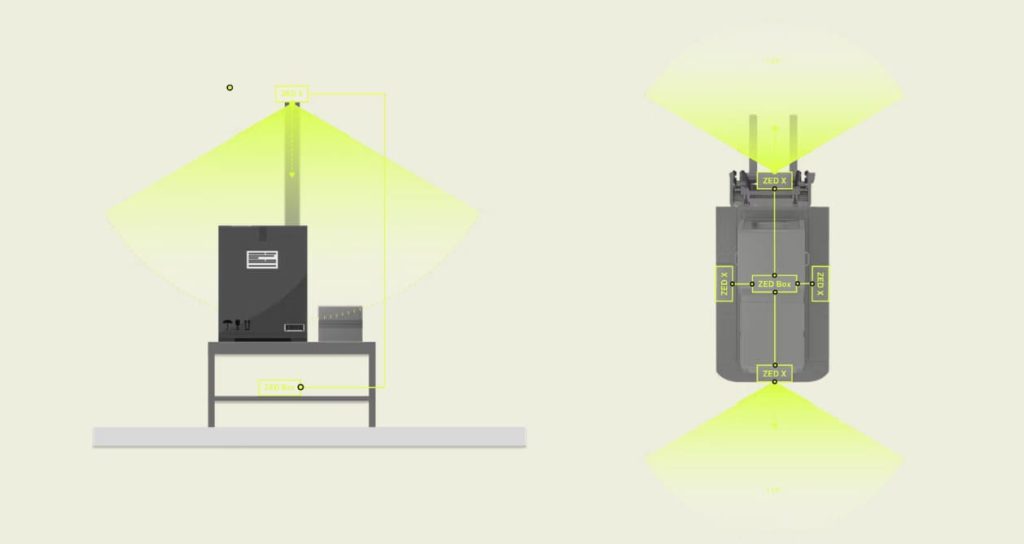
● 边缘计算集成:NVIDIA Jetson平台深度适配,提供多相机硬件级同步采集
核心算法与二次开发:
● 空间定位与SLAM方案,优化机器人/无人机的轨迹追踪精度
● AI感知算法集成:自定义算法模型集成,实现3D目标检测与物体追踪等应用
● SDK定制与驱动调试:API封装、ROS2节点开发、驱动适配与性能优化服务
一站式方案设计:
● 自动驾驶/巡检机器人:提供“感知+定位+避障”一体化方案,实现复杂环境下稳定导航与自主运行
● 工业自动化/体积测量:体积测量、机械臂引导
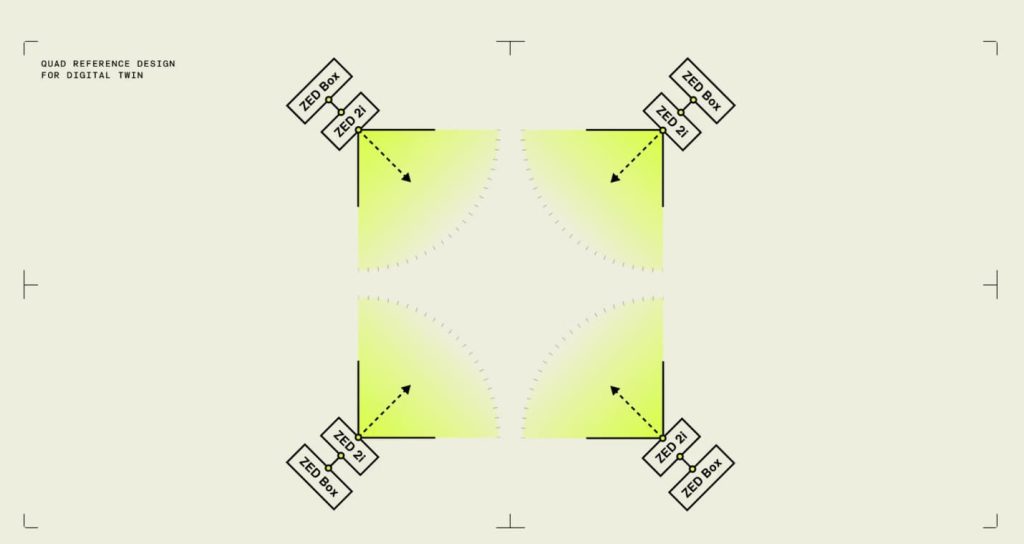
● 数字孪生与AR/VR:实时环境3D重建


多功能单目感知相机
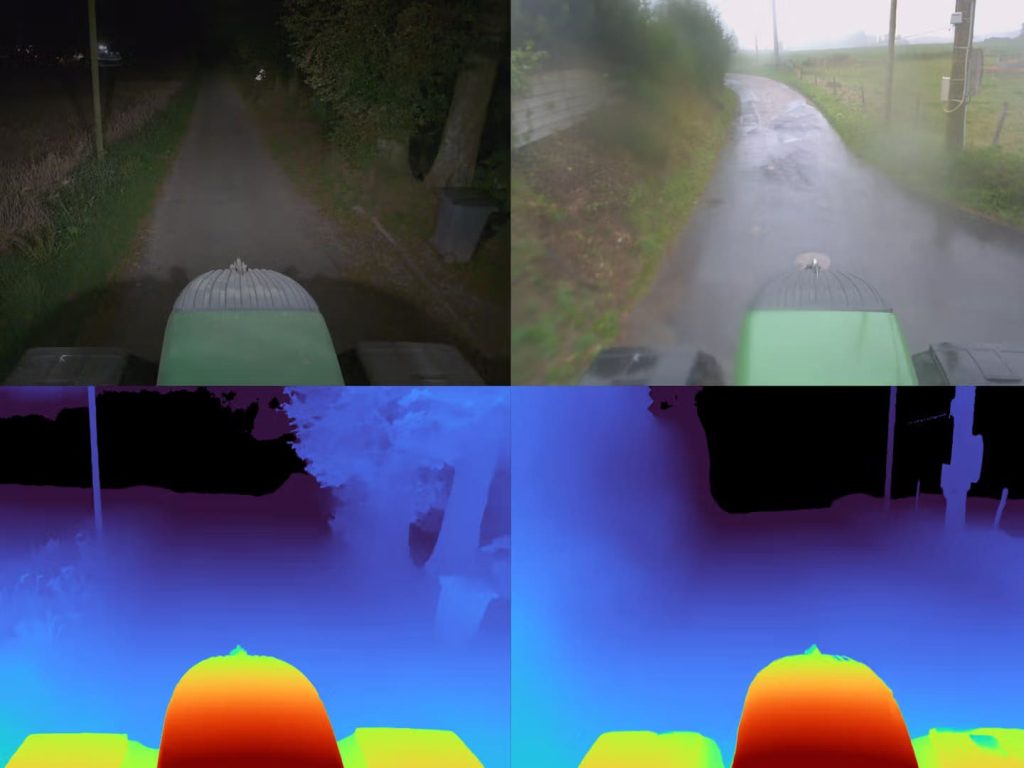
在高分辨率、低延迟与全天候可靠性之间实现出色平衡

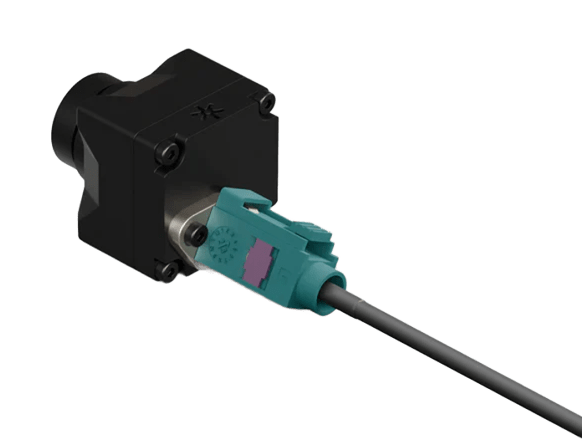
GMSL2双目感知相机
ZED X专注于障碍物检测和导航,ZED X Mini则专注于近距离应用如拾取

IP66 防护等级卷帘快门双目立体相机
专为空间分析和沉浸式体验设计,由
Neural Depth Engine 2 提供
支持

紧凑且强大的嵌入式边缘算力盒
由NVIDIA Jetson Orin驱动的边缘3D感知和AI计算
