
友思特案例 | 3D视觉有效处理托盘随机排列的包裹
全球机器人集成商 AWL 提供智能机器人卸垛机解决方案 RODE,安装了两台Ensenso 3D 相机,以提供所需的图像数据,由智能机器人支持的卸垛机可自动将纸箱、包装袋或集装箱等任何包装货物从托盘上卸下,从而确保其连续加工,不会出现延误或停机,最多可连续运行 800 个包裹。


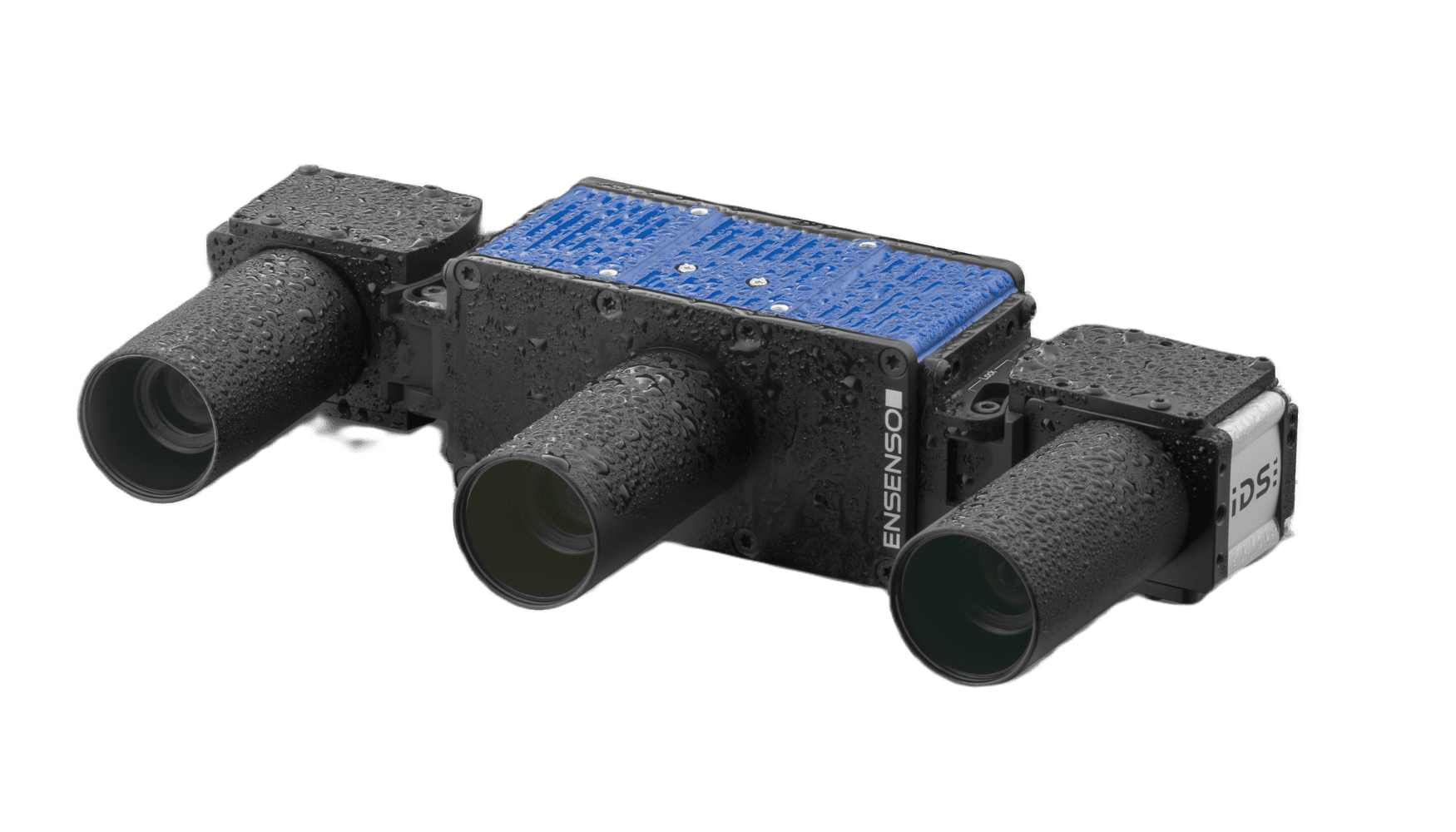
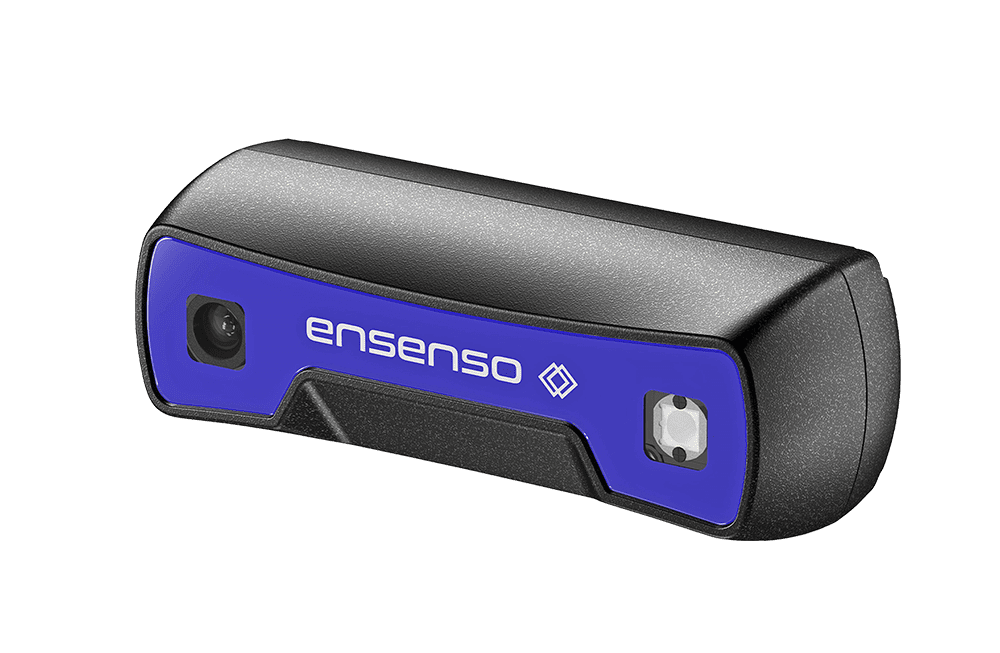
非常适合协作机器人,具有紧凑而坚固的3D摄像系统,专门为在恶劣环境条件下使用而设计
集成投影仪结构轻松捕捉无纹理表面的物体,即使是户外、困难光照条件下仍提供高精度图像
工作距离可达3米,实时3D数据,全分辨率下达30帧/秒









全球机器人集成商 AWL 提供智能机器人卸垛机解决方案 RODE,安装了两台Ensenso 3D 相机,以提供所需的图像数据,由智能机器人支持的卸垛机可自动将纸箱、包装袋或集装箱等任何包装货物从托盘上卸下,从而确保其连续加工,不会出现延误或停机,最多可连续运行 800 个包裹。

Fizyr公司将紧凑、坚固的Ensenso 3D摄像机与IDS的高性能GigE uEye摄像机相结合,提供自动化的视觉解决方案,可以在各种条件和应用中实现物流自动化,如物品拣选、包裹处理、拆垛、卡车卸货或行李处理。

全自动码垛机器人用于无人仓库。最重要的要求是,机器人必须能够准确识别和精确处理托盘上各种可用的产品型号或纸箱,以便进行卸载。在Ensenso 3D摄像头的帮助下,这个问题得到了解决。X36 提供了完美的解決方案给这个项目。



超紧凑、高精度深度、 TOF原理
利用AI的3D激光点阵图案三角测量技术,多场景可用,设计超紧凑

配备完全集成RGB传感器
提供多种型号,可选基线长度(S:240 mm,M:455 mm)和焦距

精准、坚固、易用
具有紧凑而坚固的3D摄像系统,专门为在恶劣环境条件下使用而设计
模块化、具备本地数据处理功能
直接在相机端进行2D图像匹配计算、在相机端生成三维点云数据传输到电脑
