

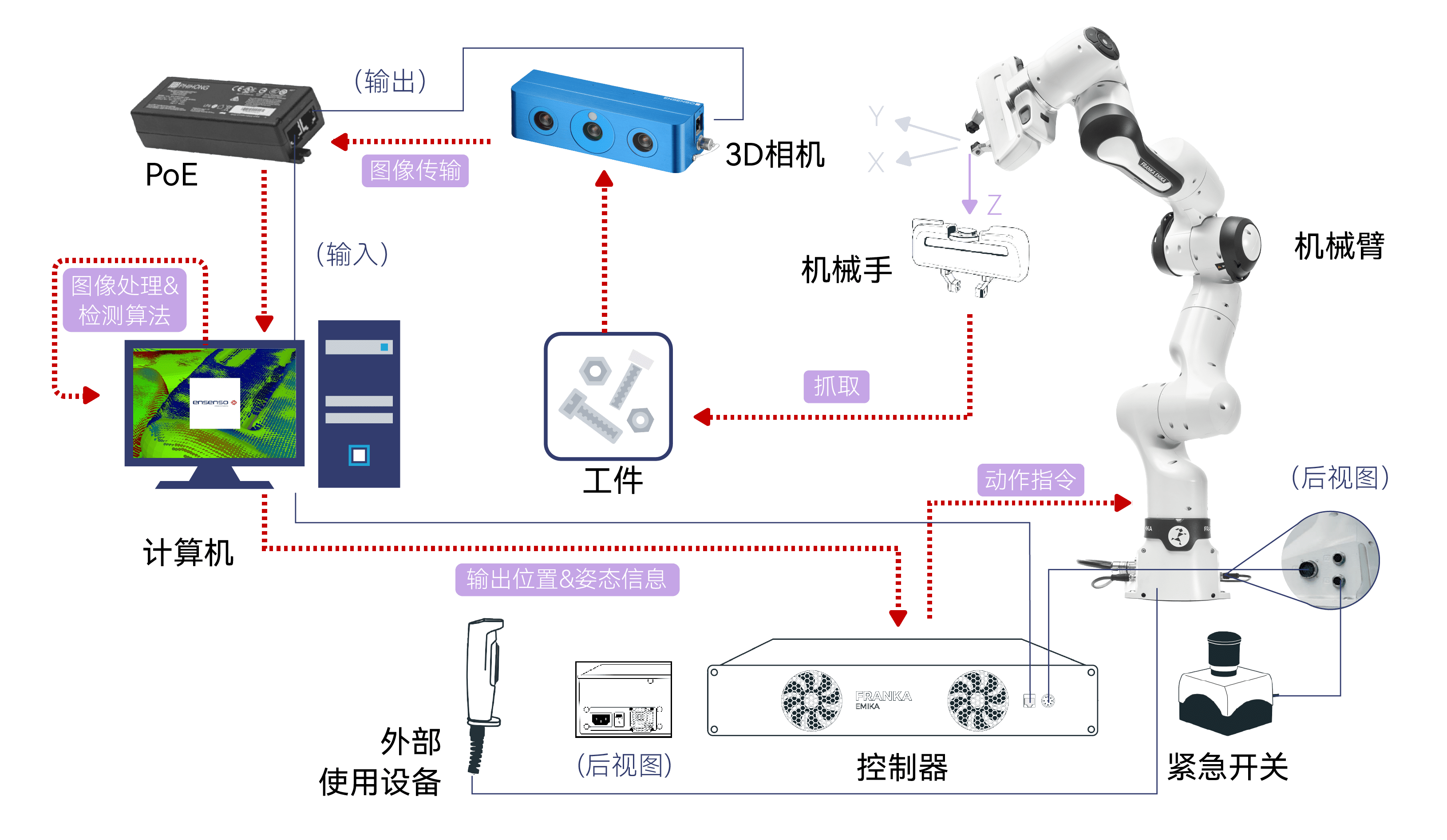
利用高精度3D相机进行实时成像,并通过零代码编写算法模块PatrFinder进行检测定位,结合智能机械臂抓取上下料
不受物体形状、尺寸和布局位置的限制,显著提高生产线的效率与智能化程度,满足汽车零部件生产中对于精度、效率和安全性的要求

传统人工上下料方式难以适应市场需求
以人工的方式进行物料分拣、上下料等工作流程存在着诸多问题:人力成本高,且存在人力资源不稳定、安全问题的风险;易导致人力疲劳与浪费,影响产线效率;难以控制操作一致性与质量 ,难以准确处理形状、尺寸、重量不规则的零部件

3D视觉成为企业数字化转型的关键技术路径之一
双目散斑3D视觉技术能精确捕捉和测量物体三维信息特征。结合机械臂系统,实现零部件的高精度定位、抓取和放置,不受物体形状、尺寸和布局位置的限制,能够显著提高生产线智能化程度,满足对精度、效率和安全性的要求。

高精度双目散斑3D相机实时成像
在2m工作距离下,该相机检测的视野范围可达1390*927mm,z轴方向上的精度为0.35mm

PartFinder零代码编写算法模块用于检测定位
导入工件的3D模型,经过软件上的简单参数配置,即可完成检测定位,并自动化识别检测工件的中心坐标以及姿态角

智能机械臂抓取上下料
3D相机通过TCP/IP协议将数据发送至机械臂,控制机械臂到指定位置,抓取目标工件到预设定的装放位置

专利技术确保高精度成像
双目视差+散斑成像技术,工作距离远、精度高、视野大
大功率投影仪适应各种工作环境
相机自带200W大功率投影仪获取工件表面完整点云轮廓信息

零代码编写,用户友好度高
配套PartFinder模块,零代码编写,无需长时间开发

快速响应
算法模块快速响应需求,便捷生成检测模型,显著提升工作效率

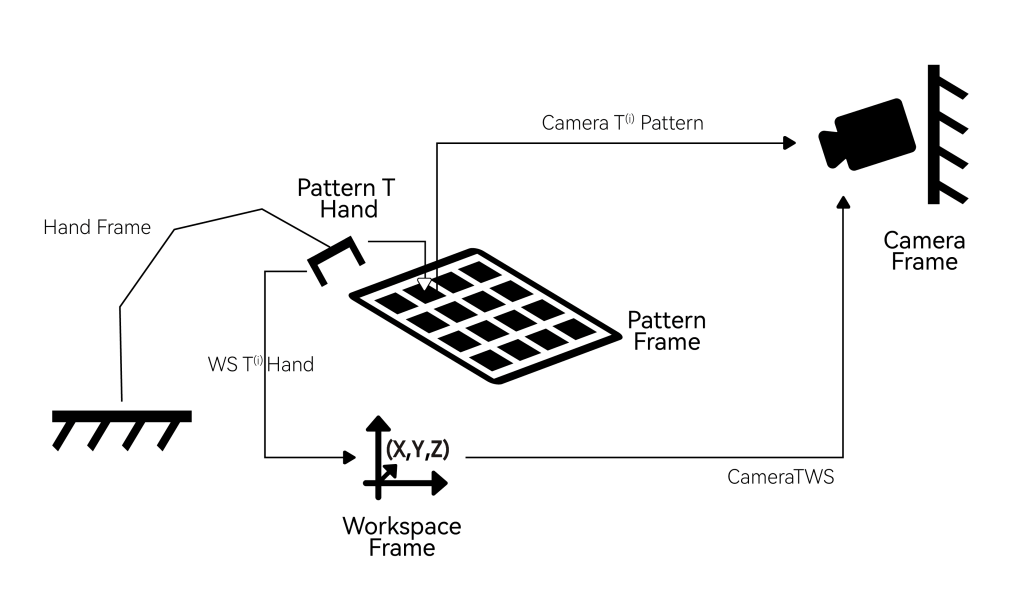
提供配套SDK
提供手眼标定的SDK及方法介绍,无需手眼标定算法研究
精准控制
精准控制七轴柔性机械臂,满足精度、效率与安全需求

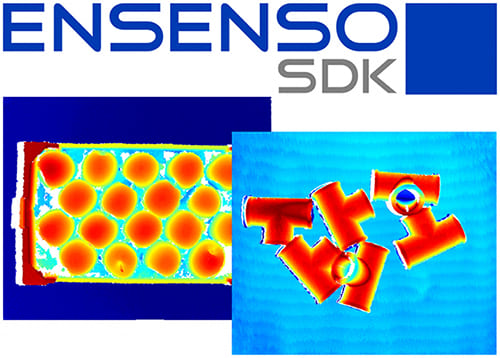

Ensenso 系列 3D立体相机
Ensenso 系列 3D工业相机 能够为各行各业的视觉检测项目提供实现快速、精准、低成本的3D图像捕捉。5个系列,多种外壳和工作距离型号可选,覆盖各类项目应用。采用核心专利技术FlexView,可以可靠地检测静止、移动物体,提供具有更高精度、可靠性、细致度的深度图像。
Ensenso SDK PartFinder 算法模块
该模块允许您加载自己的CAD几何图形,并在Ensenso 3D相机的点云中定位这些图形。
它可以综合使用深度信息、表面法线和纹理数据,因此可以解决棘手的定位任务。
它可以综合使用深度信息、表面法线和纹理数据,因此可以解决棘手的定位任务。
