

基于Part Finder模块与Ensenso3D相机设备实现部件识别与分割,并配合控制机器臂等设备动作,显著提升上下料、分拣等系统的效率
此算法模块的应用非常方便快捷,零代码编写,只需要在软件UI界面进行4个步骤的操作即可准确识别、分割、计算工件位置方向

3D视觉技术应用逐渐成熟
随着工业自动化与视觉技术的不断发展,企业纷纷开始采用3D视觉引导汽车部件自动化上下料操作。友思特推出的工件点云检测定位应用解决方案,基于Part Finder模块与Ensenso3D相机设备,能够实现部件识别与分割,并配合控制机器臂和其他设备动作,显著提升自动化上下料、分拣等系统的效率和准确性。

零代码编写,4步即可完成模块应用
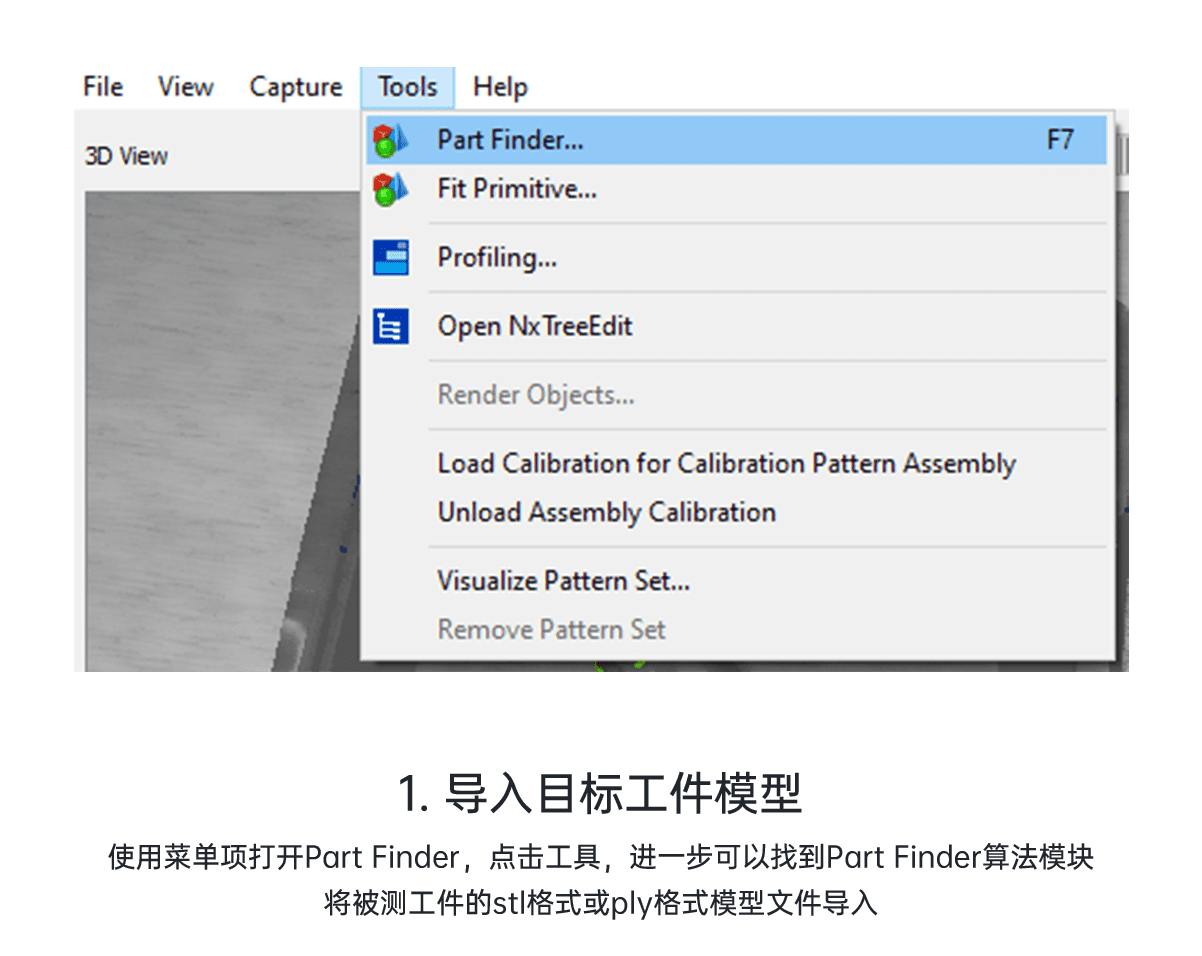
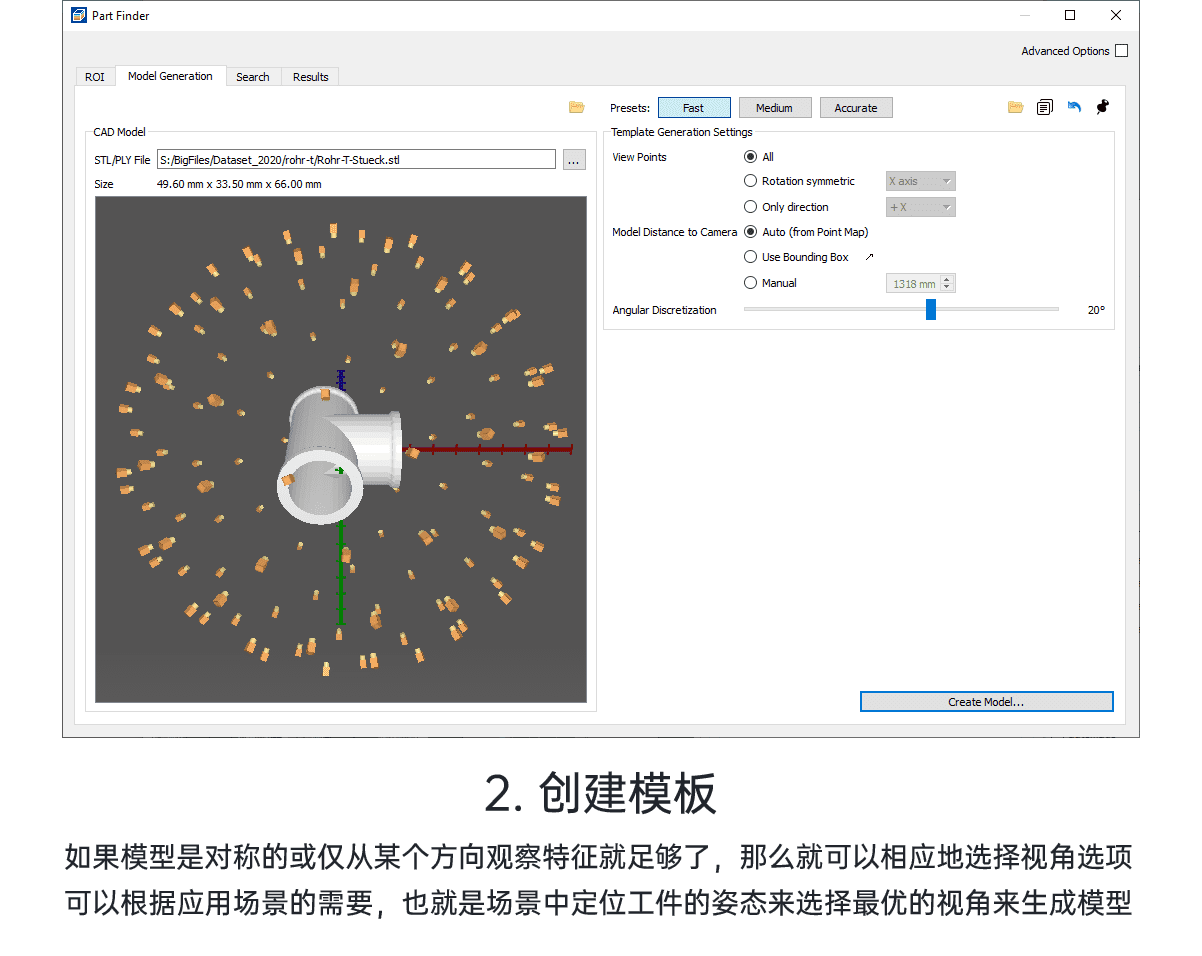
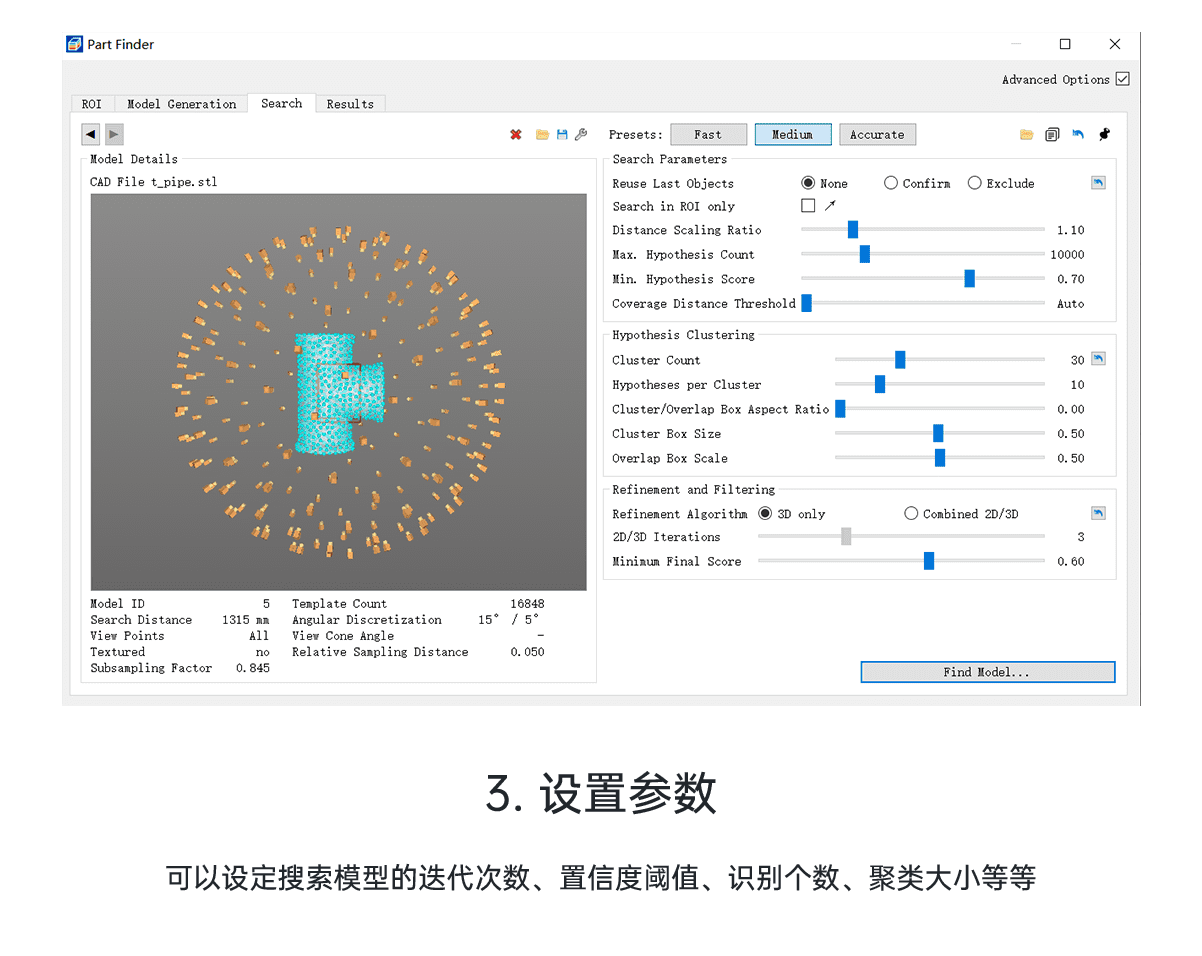
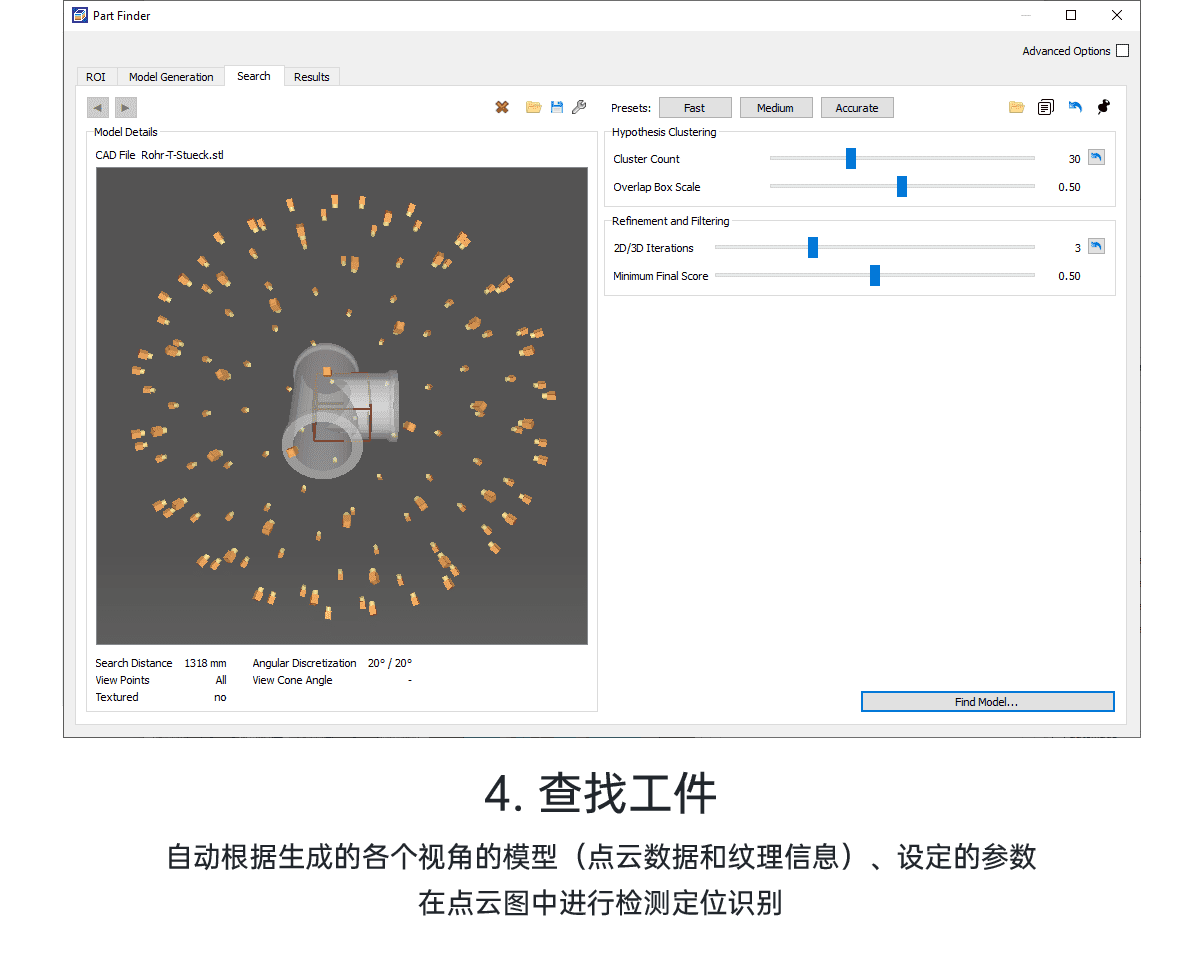
此算法模块的应用方便快捷,零代码编写,只需在软件UI界面进行 “导入目标工件模型” —— “创建模板” —— “设置参数” —— “查找工件” 4个步骤的操作即可准确识别、分割、计算工件位置方向。

软硬件配套使用
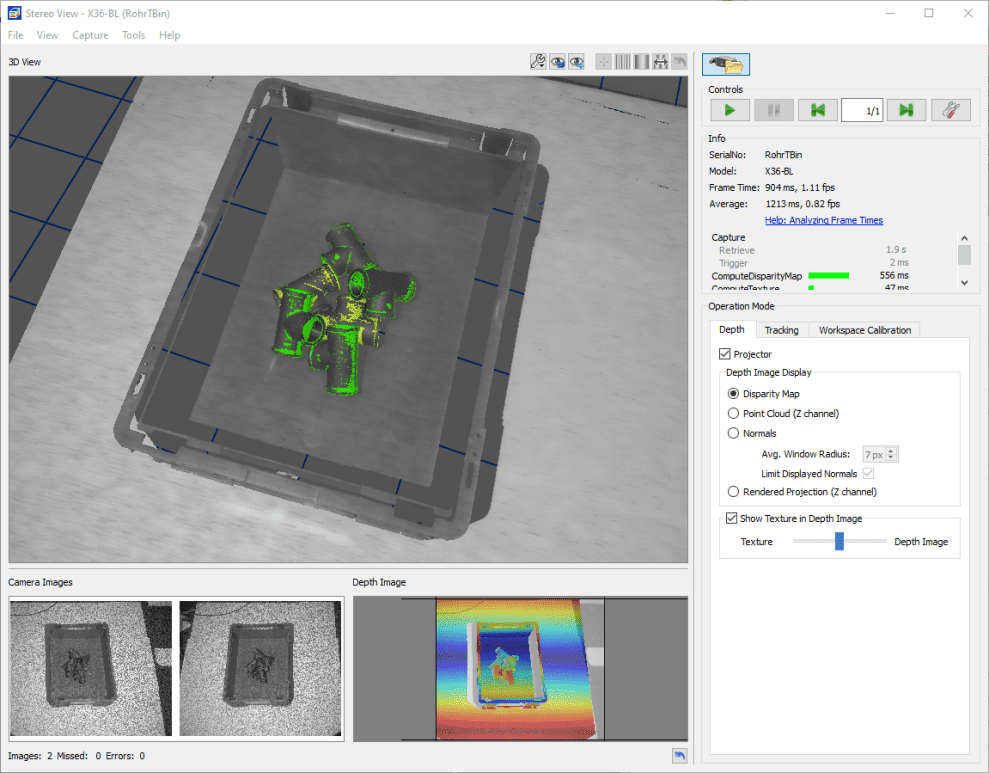
与高精度Ensenso双目散斑3D相机配合使用

高效生成模型
快速、精确生成模型和搜索匹配目标单体

结合纹理和深度数据
在定位识别中,可同时结合纹理和深度数据
处理零件方向
可处理自相似零件方向

用户友好度高
应用便捷,无代码编写,4个步骤即可准确识别
支持多种几何体类型处理
支持处理球体、长方体等不同几何体类型
检测复杂几何形状
支持检测复杂的3D表面几何形状,适配多个应用场景

识别部件姿态
支持识别带有纹理部件的不同姿态
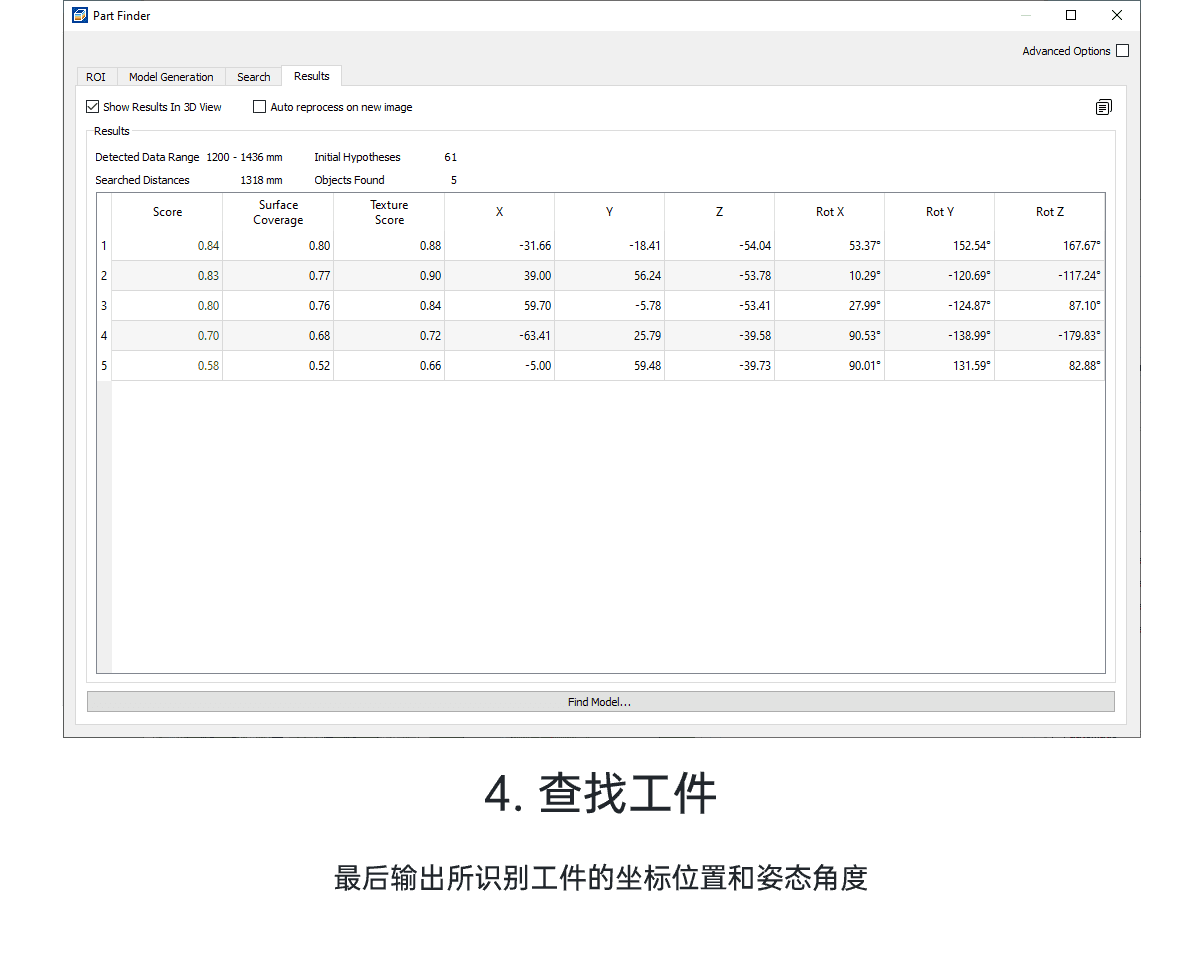

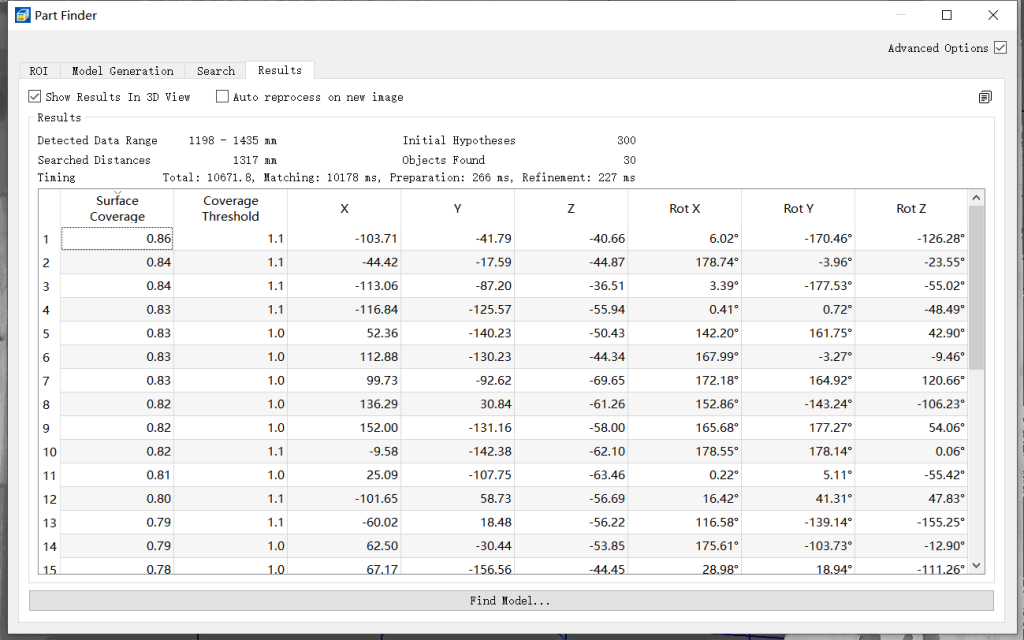
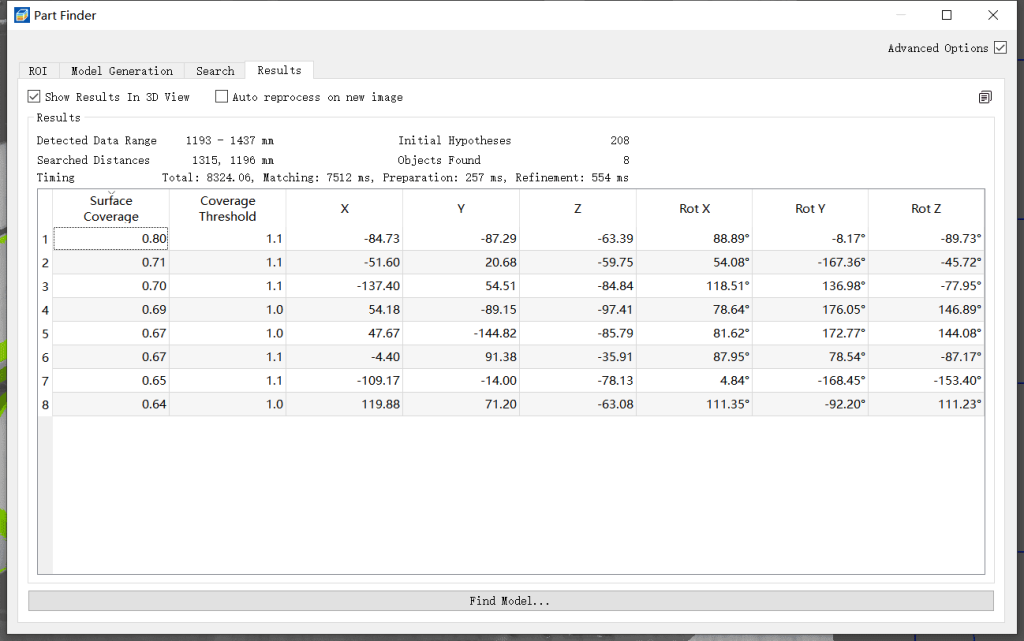
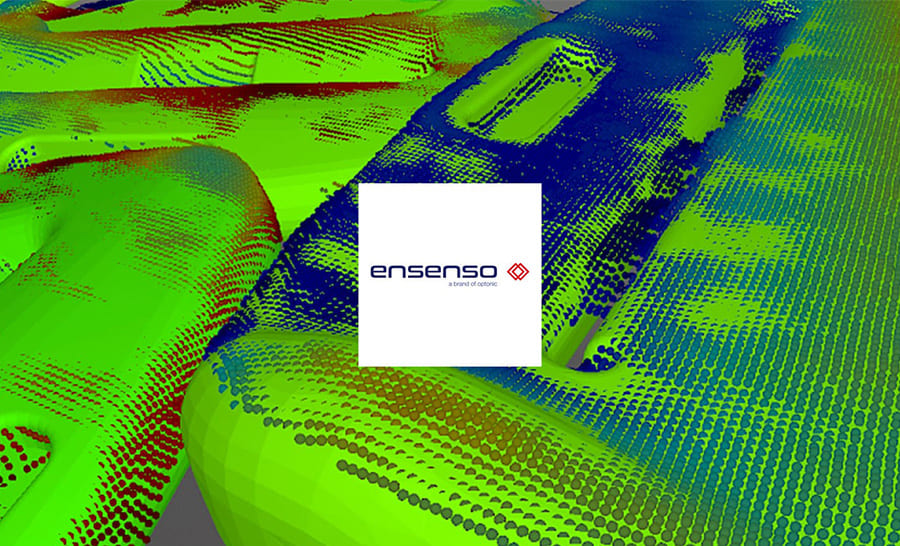
提供清晰精确的可视化数据
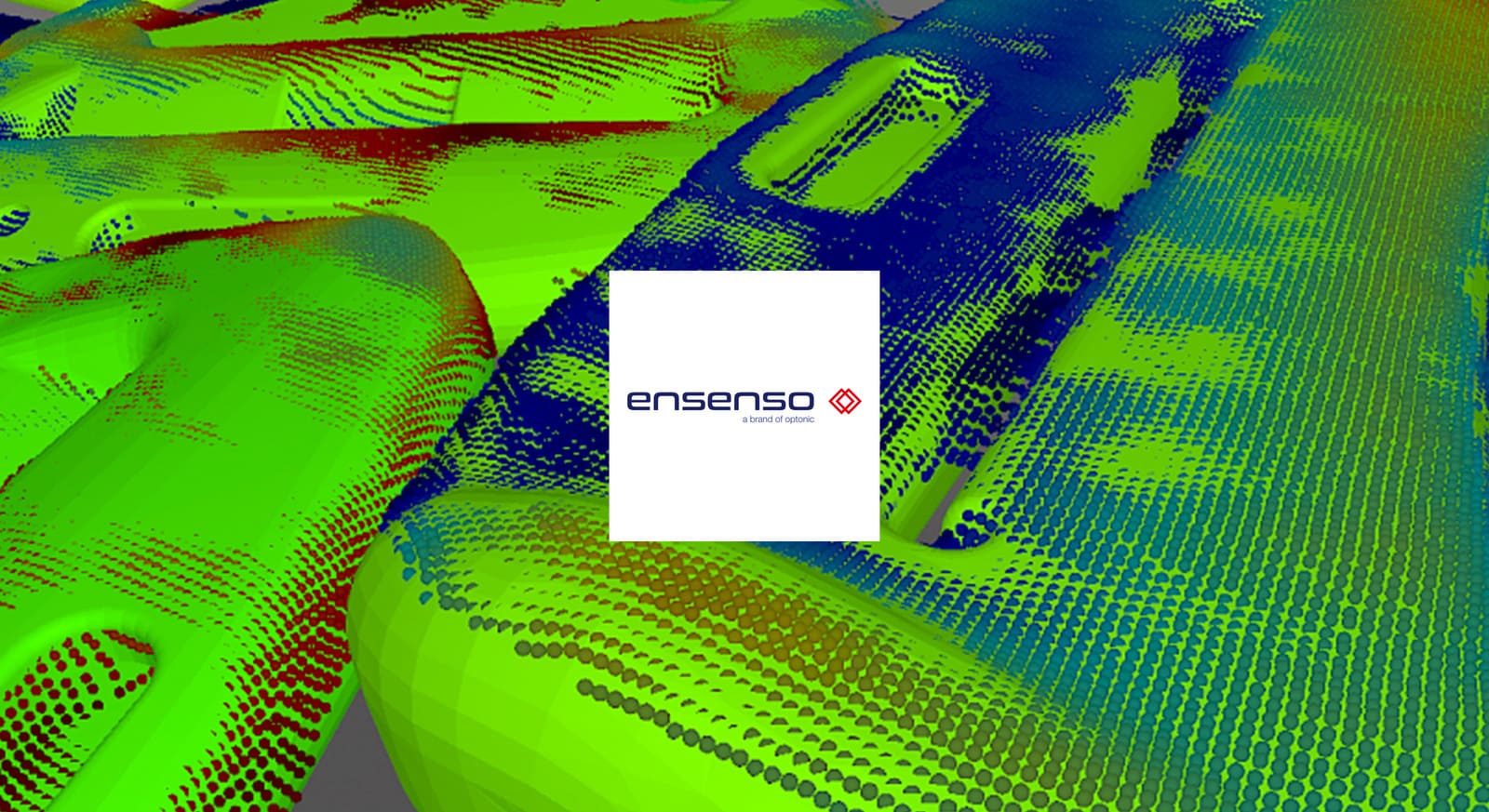
可视化效果的颜色表示匹配的覆盖范围。好的匹配将是绿色的,较差的匹配(例如某些部分被遮挡)将是橙色的。 并且会生成总报表,将视野范围内所识别定位的所有工件列出来,包含识别分数、XYZ坐标姿态等信息。

便捷找到单独目标物
透过我们的Part Finder算法功能模块,便可以找到3D相机视野下的每一个单独的目标物。

提供C++例程和SDK生成模型
除此之外,为了让您能够将我们的点云实例分割部署到自己的应用中,我们会提供C++例程, 您可以调用我们的SDK,快速便捷地实现网络模型生成和搜索目标物两个操作。








Ensenso 系列 3D立体相机
Ensenso 系列 3D工业相机 能够为各行各业的视觉检测项目提供实现快速、精准、低成本的3D图像捕捉。5个系列,多种外壳和工作距离型号可选,覆盖各类项目应用。采用核心专利技术FlexView,可以可靠地检测静止、移动物体,提供具有更高精度、可靠性、细致度的深度图像。
Ensenso SDK PartFinder 算法模块
该模块允许您加载自己的CAD几何图形,并在Ensenso 3D相机的点云中定位这些图形。
它可以综合使用深度信息、表面法线和纹理数据,因此可以解决棘手的定位任务。
它可以综合使用深度信息、表面法线和纹理数据,因此可以解决棘手的定位任务。
