友思特分享 | 1小时800件?看Ensenso 3D相机如何加速智能机器人的分拣效率
大量的快递运输需求和普遍存在的劳动力短缺问题催生了物流自动化程度的提升。友思特 Ensenso 3D相机为智能机器人卸垛机方案提供精确的图像数据,使800件/小时的物流分拣运力成为现实。


集Ensenso系列产品所有优点于一身,具有紧凑而坚固的3D摄像系统,恶劣环境下也非常适用
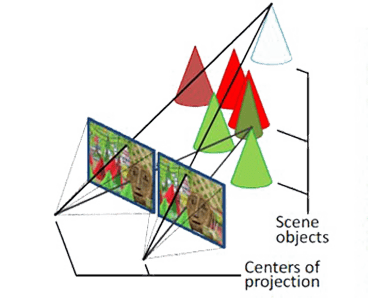
完全集成的短焦光学元件可在 21 厘米的物距范围内使用两台 500 万像素立体相机
高景深高分辨率,确保工作区域内的物体始终保持对焦和完美的清晰度
















大量的快递运输需求和普遍存在的劳动力短缺问题催生了物流自动化程度的提升。友思特 Ensenso 3D相机为智能机器人卸垛机方案提供精确的图像数据,使800件/小时的物流分拣运力成为现实。
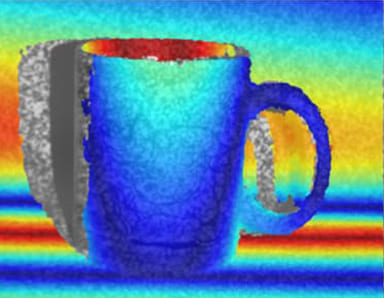
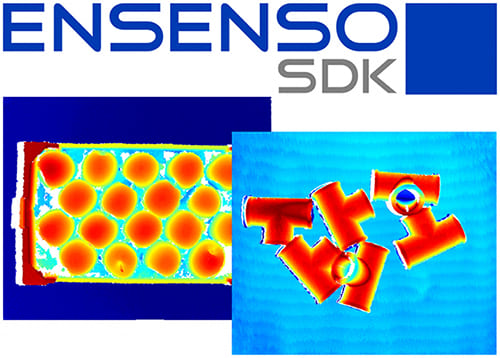
三维点云是完成精密化 PCB 检测的最新视觉技术。友思特 Saccde Vision 视觉扫描系统,采用先进的三维成像技术和算法输出直观点云图,进一步确保了PCB生产的可靠性与稳定性能。

基于友思特 Ensenso 系列高精度 3D相机 实时采集车辆四轮的三维点云图,提取关键信息并进行计算分析,实现车辆四轮定位的精确测量,对车辆轮胎的角度、倾斜度、前后轮对齐、角度等数据进行实时监测和分析,以便及时发现和纠正轮胎问题,广泛应用于汽车整车厂、第一装配厂、维修站等场所均可使用。

精准、坚固、易用
具有紧凑而坚固的3D摄像系统,专门为在恶劣环境条件下使用而设计

配备完全集成RGB传感器
提供多种型号,可选基线长度(S:240 mm,M:455 mm)和焦距

模块化可灵活调整、适应项目需求
镜头外置,可变基线、可调视角、可选镜头,提供160w/500w高分辨率选项
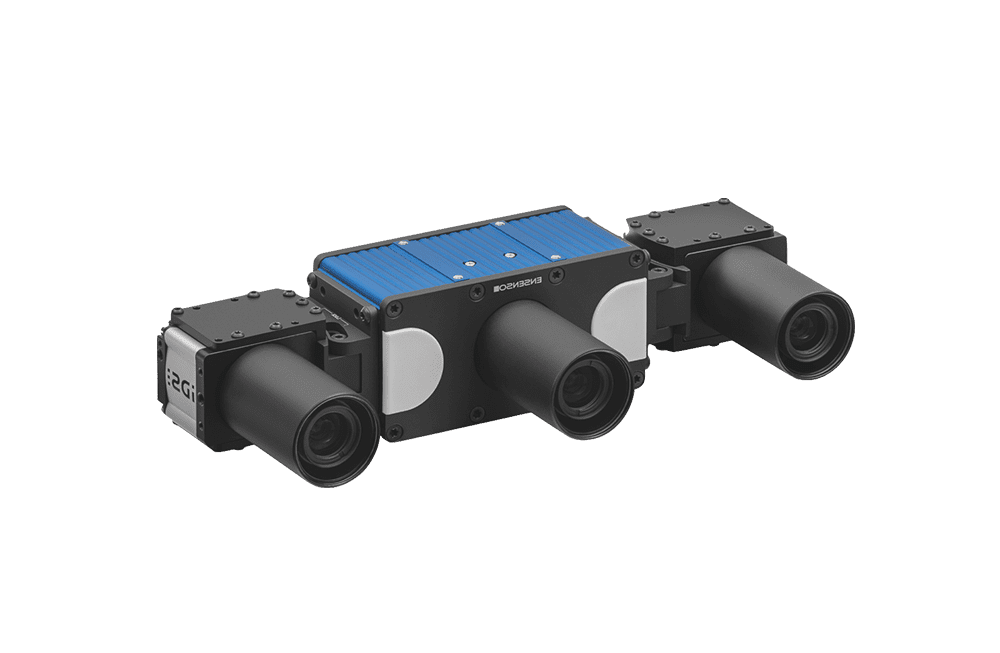
模块化、具备本地数据处理功能
直接在相机端进行2D图像匹配计算、在相机端生成三维点云数据传输到电脑