
智能相机手势识别
从理念到实施

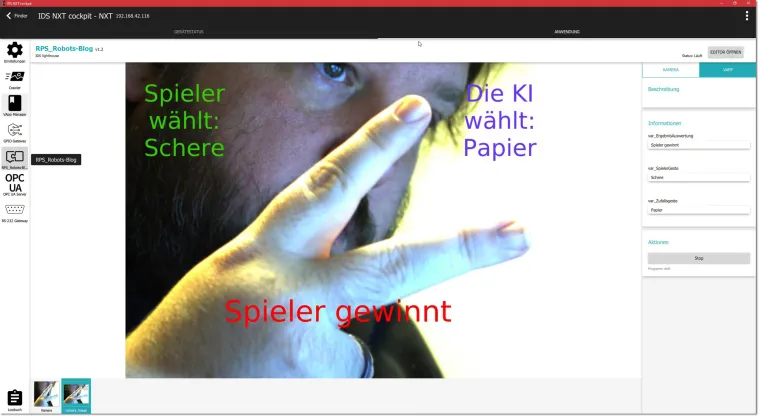
第一步:基于图像处理的手势识别

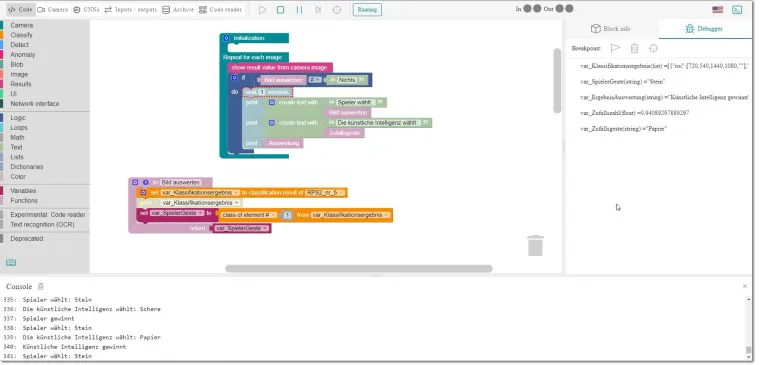
进一步处理
进一步处理已分析的图像数据
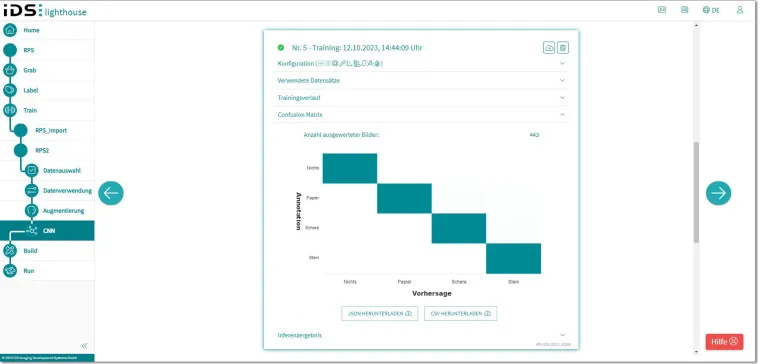
直接在相机上进行“微调”
友思特 方案产品套装介绍

NXT Experience Kit解决方案
工业图像处理中AI应用的完整推理相机解决方案。该系统包含用户在其生产环境中搭建、训练和运行神经网络所需的所有组件,包括所需的硬件和软件。

Lighthouse AI图像处理工具
基于云的软件解决方案,无需具备深度学习、图像处理或相机编程的相关先验知识,用户也可以管理训练图像,完成人工智能化图像处理任务,并搭建个人专属的人工神经网络。
